

Question: Consider a spring-mass system under the action of an external + ay + y = u Here y is the horizontal displacement of the
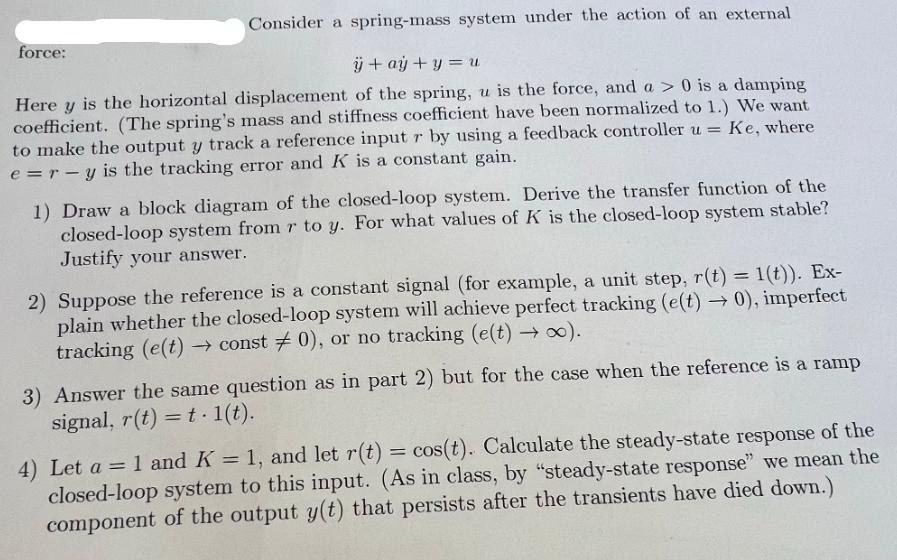
Consider a spring-mass system under the action of an external + ay + y = u Here y is the horizontal displacement of the spring, u is the force, and a > 0 is a damping coefficient. (The spring's mass and stiffness coefficient have been normalized to 1.) We want Ke, where to make the output y track a reference input r by using a feedback controller u = e=r-y is the tracking error and K is a constant gain. force: 1) Draw a block diagram of the closed-loop system. Derive the transfer function of the closed-loop system from r to y. For what values of K is the closed-loop system stable? Justify your answer. 2) Suppose the reference is a constant signal (for example, a unit step, r(t) = 1(t)). Ex- plain whether the closed-loop system will achieve perfect tracking (e(t) 0), imperfect tracking (e(t) const 0), or no tracking (e(t) ). 3) Answer the same question as in part 2) but for the case when the reference is a ramp signal, r(t) = t. 1(t). 4) Let a = 1 and K = 1, and let r(t) = cos(t). Calculate the steady-state response of the closed-loop system to this input. (As in class, by "steady-state response" we mean the component of the output y(t) that persists after the transients have died down.)
Step by Step Solution
3.39 Rating (152 Votes )
There are 3 Steps involved in it
The skin friction coefficient Cf for a laminar boundary ... View full answer

Get step-by-step solutions from verified subject matter experts