

Question: Problem 4 (45 pts) Suppose a camera calibration gives a transformation (R, T) such that a point P E R3 in the world maps to
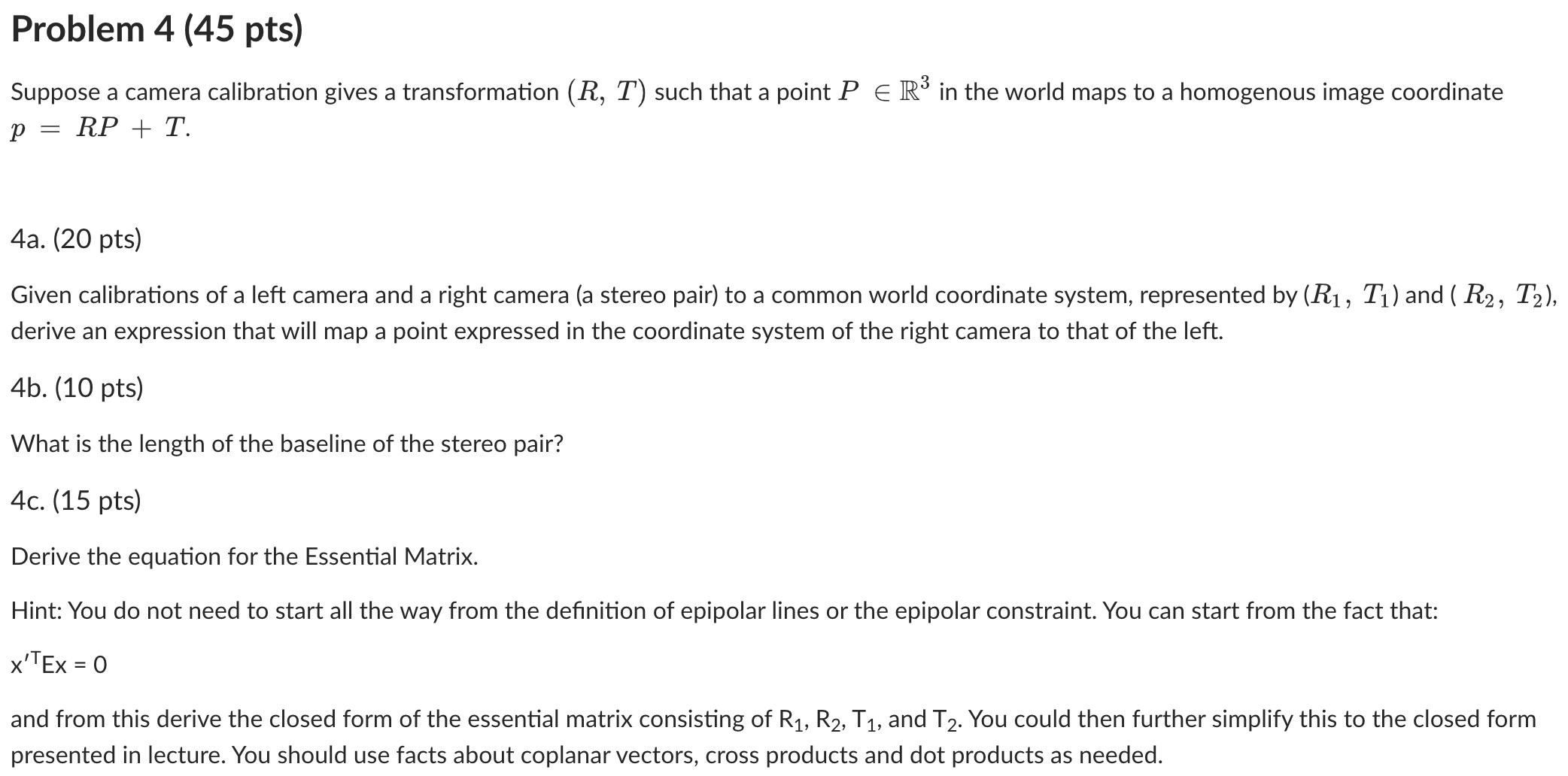
Problem 4 (45 pts) Suppose a camera calibration gives a transformation (R, T) such that a point P E R3 in the world maps to a homogenous image coordinate p=RP+T. 4a. (20 pts) Given calibrations of a left camera and a right camera (a stereo pair) to a common world coordinate system, represented by (R1, T1) and (R2, T2), derive an expression that will map a point expressed in the coordinate system of the right camera to that of the left. 4b. (10 pts) What is the length of the baseline of the stereo pair? 4c. (15 pts) Derive the equation for the Essential Matrix. Hint: You do not need to start all the way from the denition of epipolar lines or the epipolar constraint. You can start from the fact that: x'TEx = O and from this derive the closed form of the essential matrix consisting of R1, R2, T1, and T2. You could then further simplify this to the closed form presented in lecture. You should use facts about coplanar vectors, cross products and dot products as needed
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts