

Question: Problem 4 . A robot navigates in a corridor with 8 segments as follows. When the position of a robot is uncertain, the degree of
Problem A robot navigates in a corridor with segments as follows.
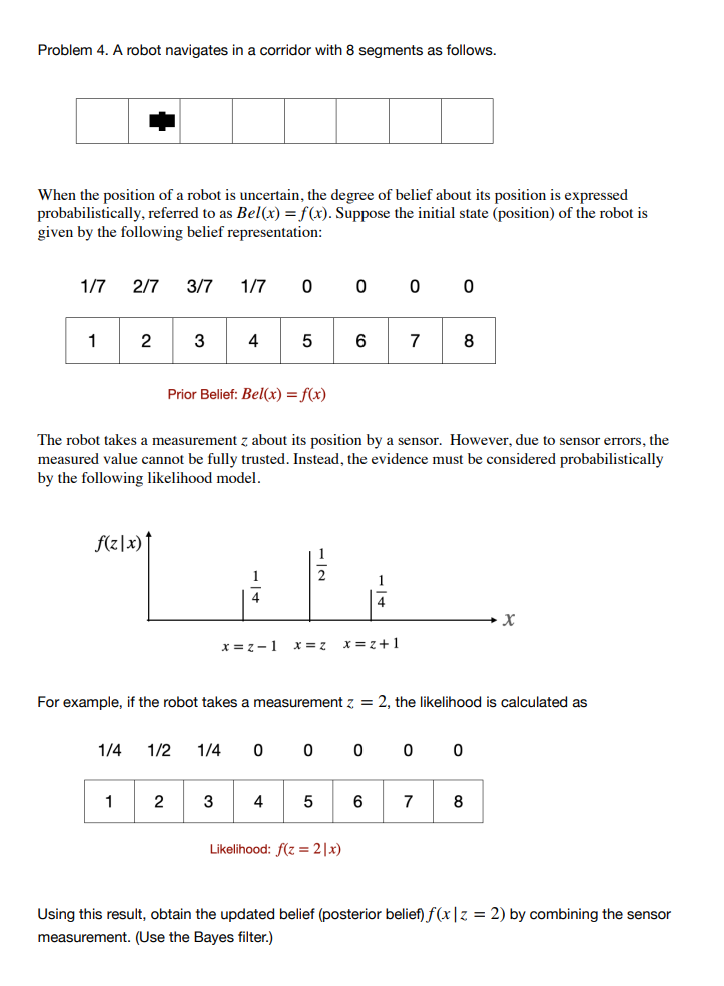
When the position of a robot is uncertain, the degree of belief about its position is expressed probabilistically, referred to as operatornameBelxfx Suppose the initial state position of the robot is given by the following belief representation:
Prior Belief: operatornameBelxfx
The robot takes a measurement z about its position by a sensor However, due to sensor errors, the measured value cannot be fully trusted. Instead, the evidence must be considered probabilistically by the following likelihood model.
For example, if the robot takes a measurement z the likelihood is calculated as
Likelihood: fzmid x
Using this result, obtain the updated belief posterior belief fx mid z by combining the sensor measurement. Use the Bayes filter.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock