

Question: Problem description: This assignment focuses on designing a finite state machine for a circuit to control a self - moving vacuum robot and then creating
Problem description:
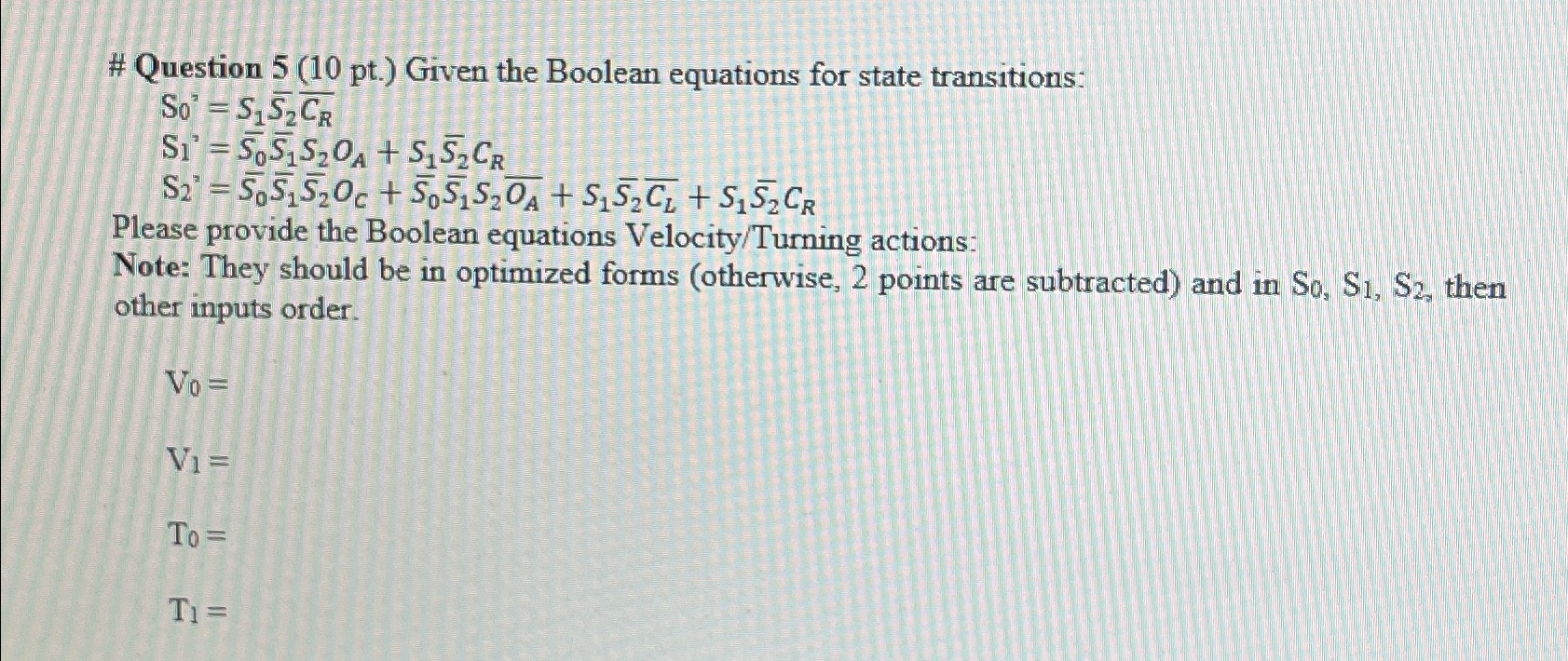
This assignment focuses on designing a finite state machine for a circuit to control a selfmoving vacuum robot and then creating a Logisim file to validate the design. The inputs to the robot include three distance sensors in the front, on the left, and on the right The outputs include two actions to control the velocity and to turn. By default, the robot keeps moving forward at its normal velocity. If the front sensor indicates that the distance to an object in front of it is less than feet True, or is close to an object the velocity action is to reduce. If the front sensor indicates that the distance to an object in front is zero True, at the object then the robot speed is set to zero. At this state, if the right sensor indicates that the robot can move right
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock