

Question: Problem Summary Make a plot with a 3-link am that can move in three-dimensional space. The arm links should be 1, 1, and 0.5 units
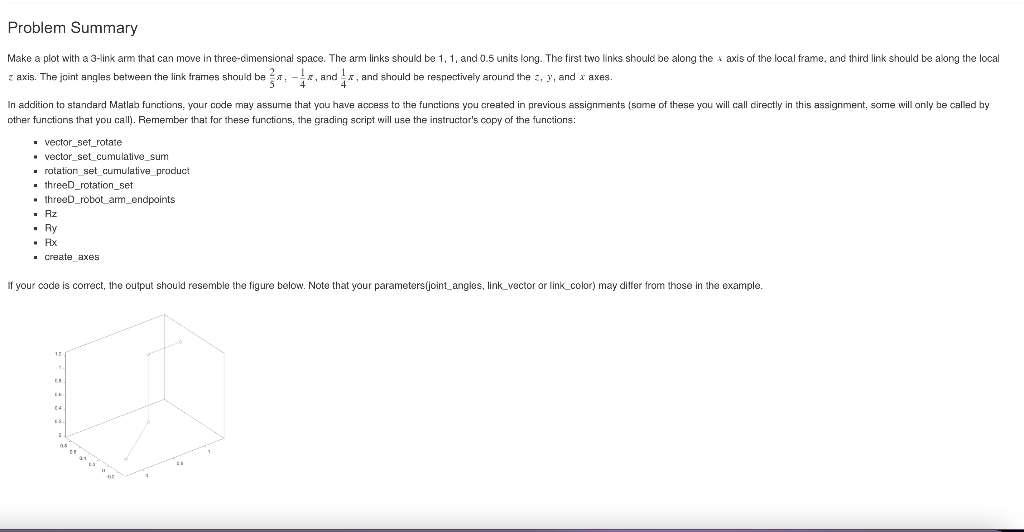
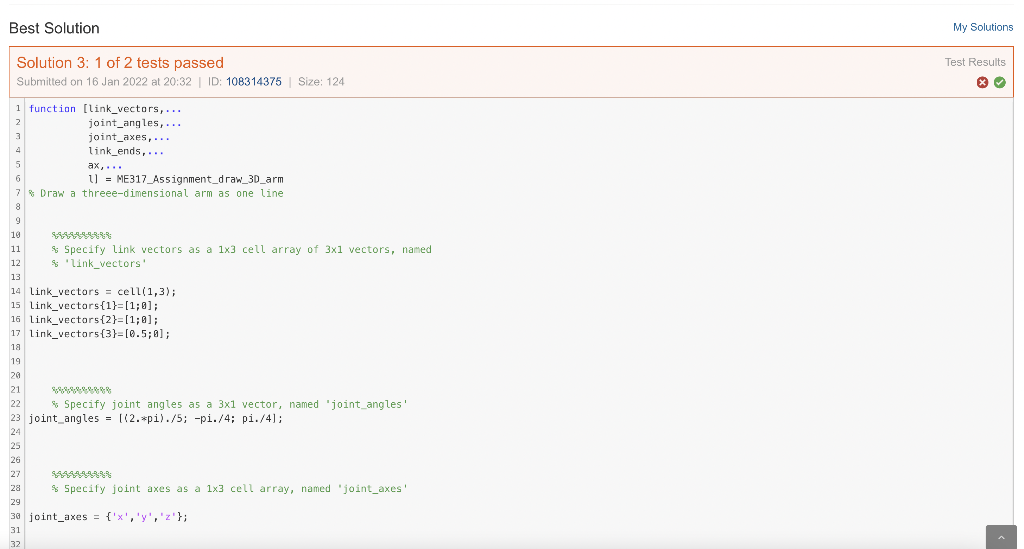
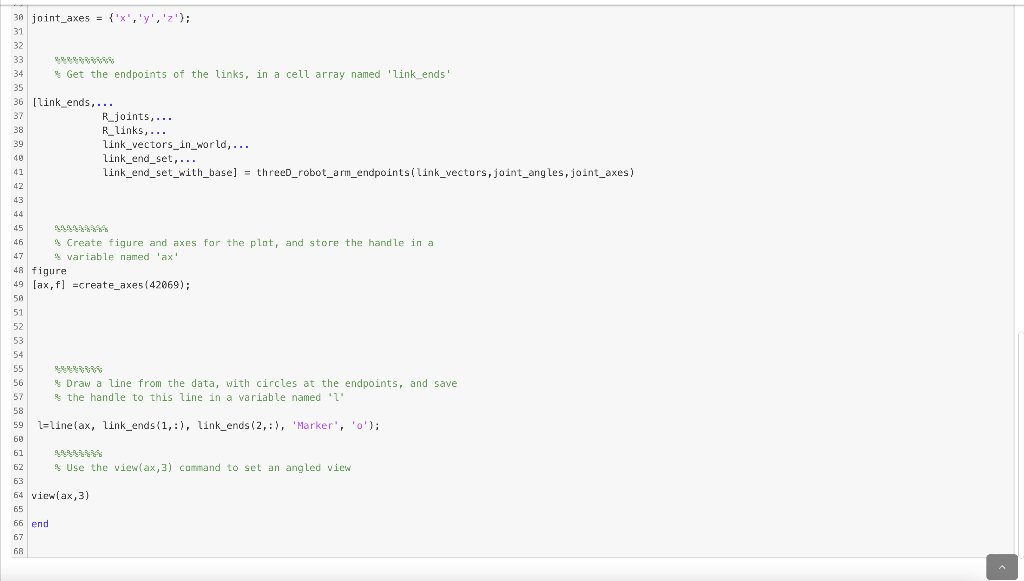
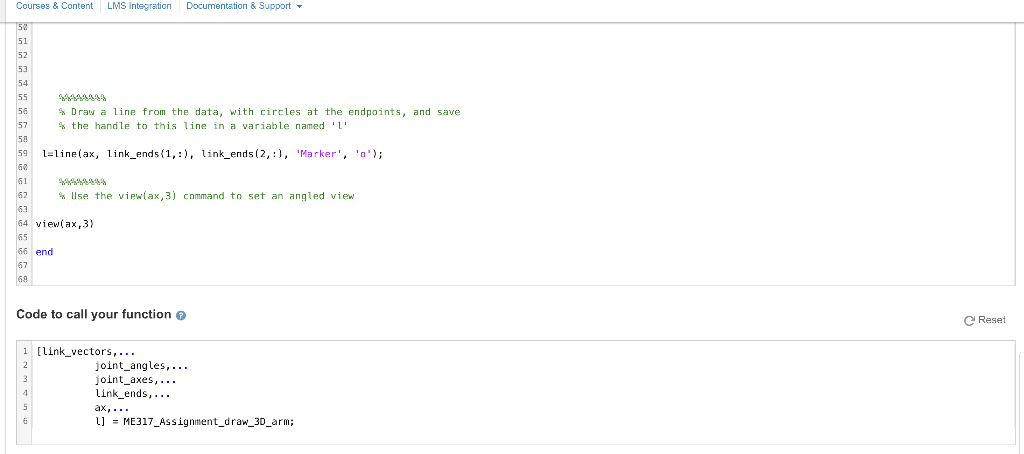
Problem Summary Make a plot with a 3-link am that can move in three-dimensional space. The arm links should be 1, 1, and 0.5 units long. The first two links should be along the axis of the local frame, and third link should be along the local z axis. The joint angles between the link frames should beand x, and should be respectively around the z, y, and x axes. In addition to standard Matlab functions, your code may assume that you have access to the functions you created in previous assignments (some of these you will call cirectly in this assignment, some will only be called by other functions that you call). Remember that for these functions, the grading script will use the instructor's copy of the functions: vector set rotate vector_set_cumulative_sum rotation_set cumulative product threeD_rotation_set threeD_robot arm_endpoints Rz . Ry RX create axes If your code is correct, the output should resemble the figure below. Note that your parametersijoint_angles, link_vector or link_color) may differ from those in the example. Best Solution My Solutions Test Results Solution 3: 1 of 2 tests passed Submitted on 16 Jan 2022 at 20:32 | ID: 108314375 Size: 124 X 4 12 i function [link_vectors,... 2 joint_angles,... 3 joint_axes,... link_ends,... 5 ax, ... 6 1] = ME317_Assignment_draw_3D_arm 7 Draw a threee-dimensional arm as one line 8 9 10 11 $ Specify link vectors as a 1x3 cell array of 3x1 vectors, named $ 'link_vectors' 13 14 Link_vectors = cell(1,3); 15 link_vectors{1}= [1;0); 16 link_vectors{2}= [1; 0); 17 link_vectors{3}=[0.5;0]; 1a 19 20 21 22 Specify joint angles as a 3x1 vector, named 'joint angles' 23 joint_angles = [(2. *pi)./5; -pi./4; pi./4]; 24 25 26 27 28 $ Specify joint axes as a 1x3 cell array, named 'joint_axes' 29 30 joint_axes = {'x', 'y', 'z'}; 31 32 30 joint_axes = {'X', 'y','2'); ',',; 31 32 33 34 Get the endpoints of the links, in a cell array named 'link_ends' 35 36 [link_ends, ... 37 R_joints,... 38 Rlinks, ... 39 link_vectors_in_world,... 40 link_end_set,... link_end_set_with_base] = threeD_robot_arm_endpointsi link_vectors,joint angles, joint_axes) 41 42 43 44 46 47 45 Create figure and axes for the plot, and store the handle in a variable named 'ax' 48 figure 49 [ax,f] =create_axes (42069); 50 51 52 53 54 55 56 8 Draw a line from the data, with circles at the endpoints, and save 57 the handle to this line in a variable named 'l' 58 59 L=linelax, link_ends (1,:), link_ends (2, :), Marker', 'o'); 60 61 62 Use the viewiax,3) command to set an angled view 63 64 viewlax, 3) 65 66 end 67 68 Courses & Content LMS Integration Documentation & Support - 50 51 52 53 54 55 56 * Draw a line from the data, with circles at the endpoints, and save 57 to the handle to this line in a variable named 'l' 58 59 L=linelax, link_ends (1,:), link_ends (2,:), 'Marker', 'o'); 60 61 62 * Use the viewlax, 3) command to set an angled view 63 64 view(ax,3) 65 66 end 67 68 Code to call your function e Reset LAWN 1 [link_vectors,... joint_angles,... joint_axes,... Link_ends,... ax,... L] = ME317_Assignment_draw_3D_arm; Problem Summary Make a plot with a 3-link am that can move in three-dimensional space. The arm links should be 1, 1, and 0.5 units long. The first two links should be along the axis of the local frame, and third link should be along the local z axis. The joint angles between the link frames should beand x, and should be respectively around the z, y, and x axes. In addition to standard Matlab functions, your code may assume that you have access to the functions you created in previous assignments (some of these you will call cirectly in this assignment, some will only be called by other functions that you call). Remember that for these functions, the grading script will use the instructor's copy of the functions: vector set rotate vector_set_cumulative_sum rotation_set cumulative product threeD_rotation_set threeD_robot arm_endpoints Rz . Ry RX create axes If your code is correct, the output should resemble the figure below. Note that your parametersijoint_angles, link_vector or link_color) may differ from those in the example. Best Solution My Solutions Test Results Solution 3: 1 of 2 tests passed Submitted on 16 Jan 2022 at 20:32 | ID: 108314375 Size: 124 X 4 12 i function [link_vectors,... 2 joint_angles,... 3 joint_axes,... link_ends,... 5 ax, ... 6 1] = ME317_Assignment_draw_3D_arm 7 Draw a threee-dimensional arm as one line 8 9 10 11 $ Specify link vectors as a 1x3 cell array of 3x1 vectors, named $ 'link_vectors' 13 14 Link_vectors = cell(1,3); 15 link_vectors{1}= [1;0); 16 link_vectors{2}= [1; 0); 17 link_vectors{3}=[0.5;0]; 1a 19 20 21 22 Specify joint angles as a 3x1 vector, named 'joint angles' 23 joint_angles = [(2. *pi)./5; -pi./4; pi./4]; 24 25 26 27 28 $ Specify joint axes as a 1x3 cell array, named 'joint_axes' 29 30 joint_axes = {'x', 'y', 'z'}; 31 32 30 joint_axes = {'X', 'y','2'); ',',; 31 32 33 34 Get the endpoints of the links, in a cell array named 'link_ends' 35 36 [link_ends, ... 37 R_joints,... 38 Rlinks, ... 39 link_vectors_in_world,... 40 link_end_set,... link_end_set_with_base] = threeD_robot_arm_endpointsi link_vectors,joint angles, joint_axes) 41 42 43 44 46 47 45 Create figure and axes for the plot, and store the handle in a variable named 'ax' 48 figure 49 [ax,f] =create_axes (42069); 50 51 52 53 54 55 56 8 Draw a line from the data, with circles at the endpoints, and save 57 the handle to this line in a variable named 'l' 58 59 L=linelax, link_ends (1,:), link_ends (2, :), Marker', 'o'); 60 61 62 Use the viewiax,3) command to set an angled view 63 64 viewlax, 3) 65 66 end 67 68 Courses & Content LMS Integration Documentation & Support - 50 51 52 53 54 55 56 * Draw a line from the data, with circles at the endpoints, and save 57 to the handle to this line in a variable named 'l' 58 59 L=linelax, link_ends (1,:), link_ends (2,:), 'Marker', 'o'); 60 61 62 * Use the viewlax, 3) command to set an angled view 63 64 view(ax,3) 65 66 end 67 68 Code to call your function e Reset LAWN 1 [link_vectors,... joint_angles,... joint_axes,... Link_ends,... ax,... L] = ME317_Assignment_draw_3D_arm
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts