

Question: Problem . This exercise focuses on DH parameters and on the forward-pose (position and orientation) kinematics transformation for the planar 3-DOF, 3R robot shown in
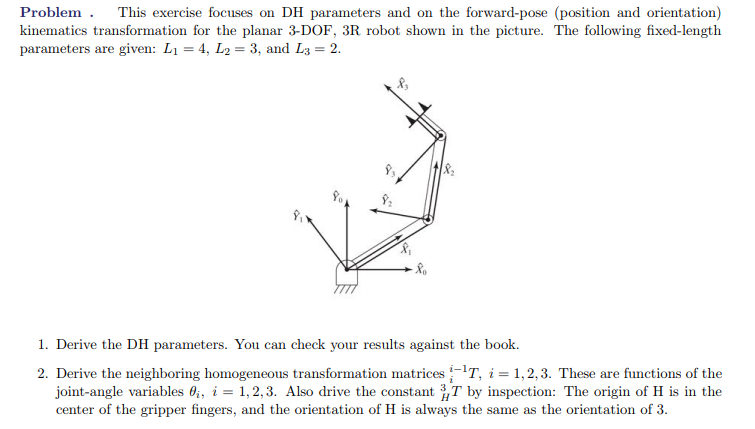
Problem . This exercise focuses on DH parameters and on the forward-pose (position and orientation) kinematics transformation for the planar 3-DOF, 3R robot shown in the picture. The following fixed-length parameters are given: L1 = 4, L2-3, and La = 2. 1. Derive the DH parameters. You can check your results against the book. 2. Derive the neighboring homogeneous transformation matrices iT,1,2,3. These are functions of the joint-angle variables 0, i 1,2,3. Also drive the constant T by inspection: The origin of H is in the center of the gripper fingers, and the orientation of H is always the same as the orientation of 3
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock