

Question: Q 1 6 Points Consider three frames, F 0 = o 0 x 0 y 0 z 0 , F 1 = o 1 x
Q
Points
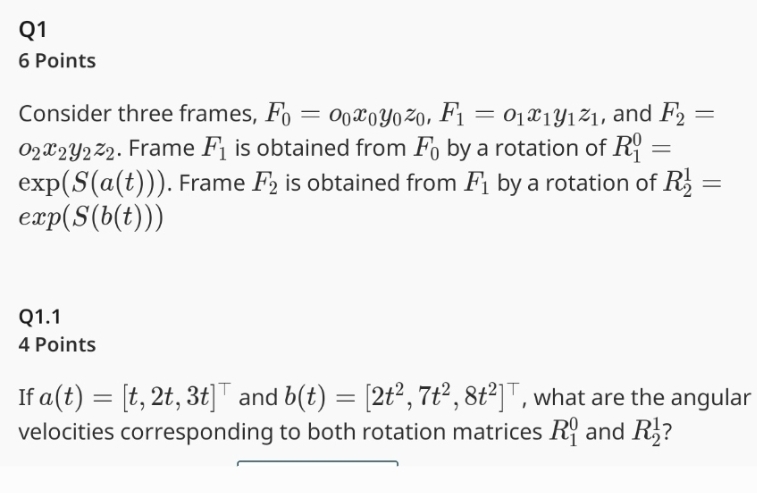
Consider three frames, and Frame is obtained from by a rotation of exp Frame is obtained from by a rotation of exp
Q
Points
If and what are the angular velocities corresponding to both rotation matrices and
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock