

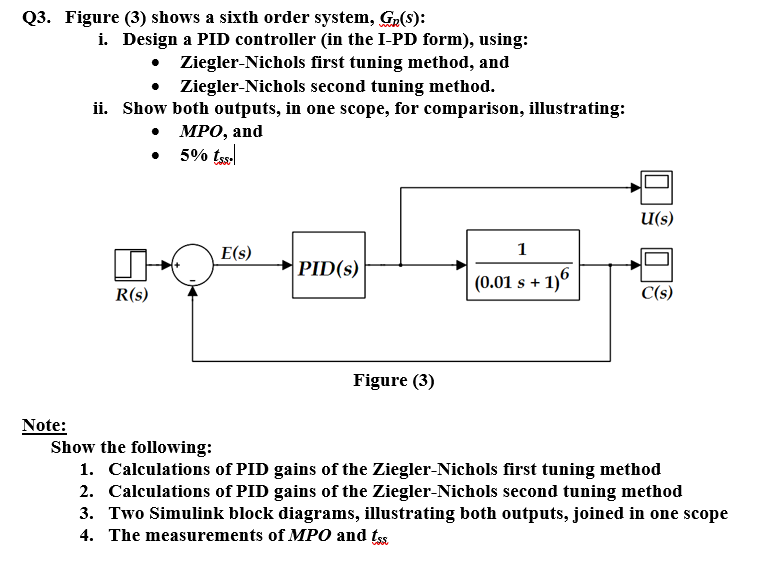
Question: Q3. Figure (3) shows a sixth order system, Gr($): i. Design a PID controller (in the I-PD form), using: Ziegler-Nichols first tuning method, and Ziegler-Nichols
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock