

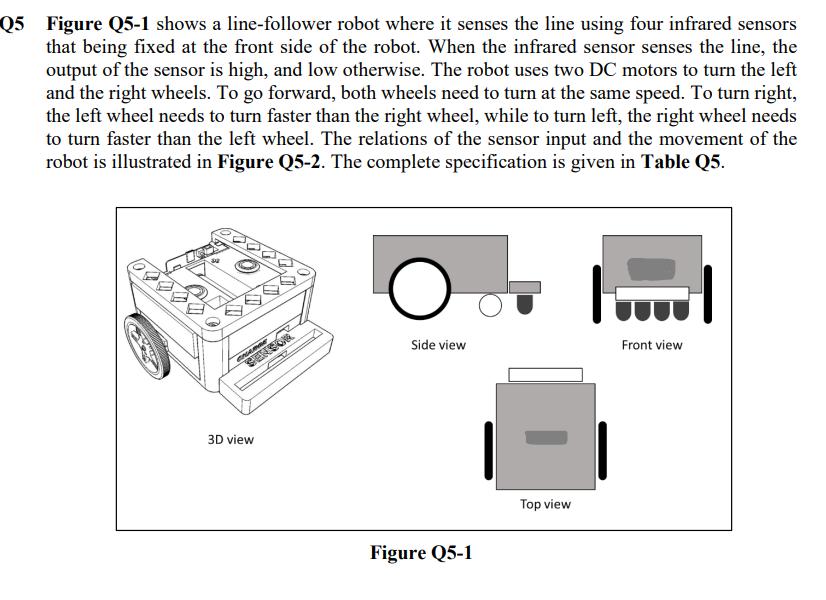
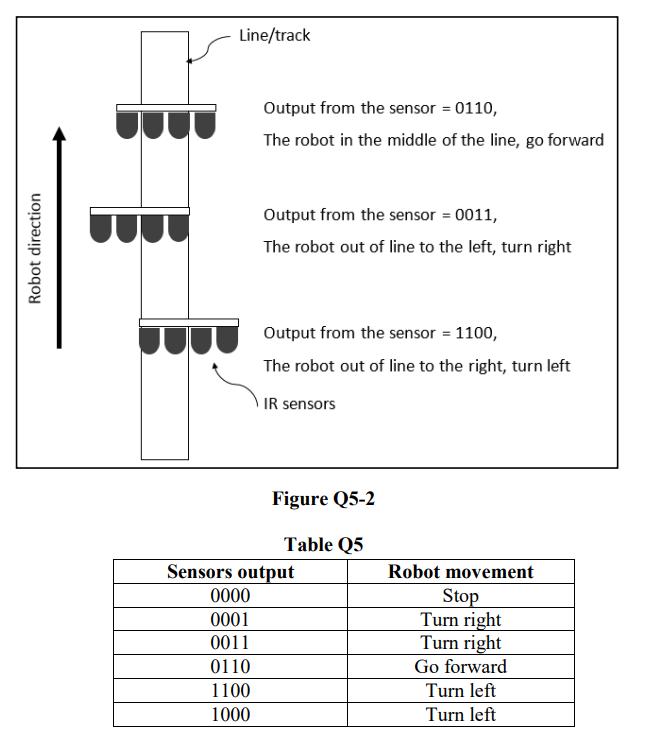
Q5 Figure Q5-1 shows a line-follower robot where it senses the line using four infrared sensors...
Fantastic news! We've Found the answer you've been seeking!
Question:
Expert Answer:

Related Book For 
International Marketing And Export Management
ISBN: 9781292016924
8th Edition
Authors: Gerald Albaum , Alexander Josiassen , Edwin Duerr
Posted Date:
