

1. A frame (C) is initially coincident with frame (A). (C) is first rotated about the...
Fantastic news! We've Found the answer you've been seeking!
Question:
Transcribed Image Text:
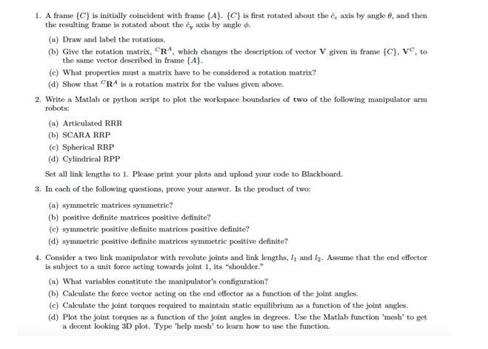
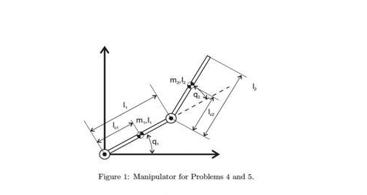
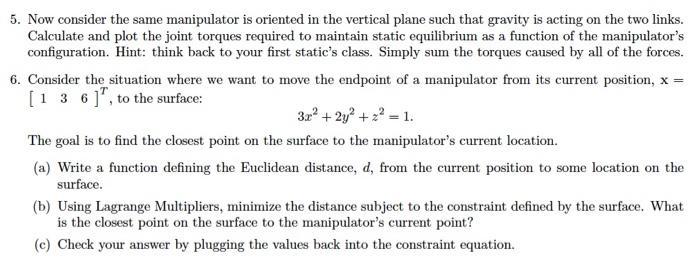
1. A frame (C) is initially coincident with frame (A). (C) is first rotated about the è, axis by angle 6, and then the resulting frame is rotated about the è, axis by angle o (a) Draw and label the rotations. (b) Give the rotation matrix. "R, which changes the description of vector V given in frame (C), VC, to the same vector described in frame (4). (e) What properties mast a matrix have to be considered a rotation matrix? (d) Show that R* is a rotation matrix for the values given above. 2. Write a Matlah or python script to plot the workspace boundaries of two of the following manipulator arm robotic (a) Articulated RRR (b) SCARA RRP (e) Spherical RRP (d) Cylindrical RPP Set all link lengths to 1. Please print your plots and upload your code to Blackboard. 3. In each of the following questions, prove your answer. Is the product of two: (a) symmetric matrices symmetric? (b) positive definite matrices positive definite? (c) symmetric positive definite matrices positive definite? (d) symmetric positive definite matrices symmetric positive definite? 4. Consider a two link manipulator with revolute joints and link lengths, I and lg. Assume that the end effector is subject to a unit force acting towards joint 1, its "shoulder." (a) What variables constitute the manipulator's configuration? (b) Calculate the force vector acting on the end effector as a function of the joint angles. (e) Calculate the joint torques required to maintain static equilibrium as a function of the joint angles. (d) Plot the joint torques as a function of the joint angles in degrees. Use the Matlab function "mesh' to get a decent looking 3D plot. Type help mesh' to learn how to use the function L m₂l mal Figure 1: Manipulator for Problems 4 and 5. 5. Now consider the same manipulator is oriented in the vertical plane such that gravity is acting on the two links. Calculate and plot the joint torques required to maintain static equilibrium as a function of the manipulator's configuration. Hint: think back to your first static's class. Simply sum the torques caused by all of the forces. 6. Consider the situation where we want to move the endpoint of a manipulator from its current position, x = [136], to the surface: 3x² + 2y² + ² = 1. The goal is to find the closest point on the surface to the manipulator's current location. (a) Write a function defining the Euclidean distance, d, from the current position to some location on the surface. (b) Using Lagrange Multipliers, minimize the distance subject to the constraint defined by the surface. What is the closest point on the surface to the manipulator's current point? (c) Check your answer by plugging the values back into the constraint equation. 1. A frame (C) is initially coincident with frame (A). (C) is first rotated about the è, axis by angle 6, and then the resulting frame is rotated about the è, axis by angle o (a) Draw and label the rotations. (b) Give the rotation matrix. "R, which changes the description of vector V given in frame (C), VC, to the same vector described in frame (4). (e) What properties mast a matrix have to be considered a rotation matrix? (d) Show that R* is a rotation matrix for the values given above. 2. Write a Matlah or python script to plot the workspace boundaries of two of the following manipulator arm robotic (a) Articulated RRR (b) SCARA RRP (e) Spherical RRP (d) Cylindrical RPP Set all link lengths to 1. Please print your plots and upload your code to Blackboard. 3. In each of the following questions, prove your answer. Is the product of two: (a) symmetric matrices symmetric? (b) positive definite matrices positive definite? (c) symmetric positive definite matrices positive definite? (d) symmetric positive definite matrices symmetric positive definite? 4. Consider a two link manipulator with revolute joints and link lengths, I and lg. Assume that the end effector is subject to a unit force acting towards joint 1, its "shoulder." (a) What variables constitute the manipulator's configuration? (b) Calculate the force vector acting on the end effector as a function of the joint angles. (e) Calculate the joint torques required to maintain static equilibrium as a function of the joint angles. (d) Plot the joint torques as a function of the joint angles in degrees. Use the Matlab function "mesh' to get a decent looking 3D plot. Type help mesh' to learn how to use the function L m₂l mal Figure 1: Manipulator for Problems 4 and 5. 5. Now consider the same manipulator is oriented in the vertical plane such that gravity is acting on the two links. Calculate and plot the joint torques required to maintain static equilibrium as a function of the manipulator's configuration. Hint: think back to your first static's class. Simply sum the torques caused by all of the forces. 6. Consider the situation where we want to move the endpoint of a manipulator from its current position, x = [136], to the surface: 3x² + 2y² + ² = 1. The goal is to find the closest point on the surface to the manipulator's current location. (a) Write a function defining the Euclidean distance, d, from the current position to some location on the surface. (b) Using Lagrange Multipliers, minimize the distance subject to the constraint defined by the surface. What is the closest point on the surface to the manipulator's current point? (c) Check your answer by plugging the values back into the constraint equation.
Expert Answer:

Related Book For 
Concepts in Federal Taxation
ISBN: 9780324379556
19th Edition
Authors: Kevin E. Murphy, Mark Higgins, Tonya K. Flesher
Posted Date:
Students also viewed these accounting questions
-
Advanced Enterprises reports year-end information from 2018 as follows: Sales Cost of goods sold Gross margin (161,000 units) Operating expenses Operating income wp $966,000 644,000 322,000 267,000...
-
As an internal auditor of Helmysha Sdn Bhd, Harini is required to perform an audit of activities within the purchasing department. The department employs 10 purchasing agents, two supervisors, a...
-
Ralston is the sole proprietor of Cut & Curl. During the year, his net earnings were $79,700. What are his self-employment taxes (OASDI and HI) on these earnings?
-
The comparative balance sheets for Karidis Ceramics, Inc., for December 31, 209 and 208 are presented on the next page. During 209, the company had net income of $96,000 and building and equipment...
-
A wire having a diameter of 0.025 mm is placed in a horizontal position in room air at 1 atm and 300 K. A voltage is impressed on the wire, producing a surface temperature of 865 K. The surface...
-
When 3-chlorocyclopropene is treated with AgBF4.AgCl precipitates. The organic product can be obtained as a crystalline material, soluble in polar solvents such as nitromethane but insoluble in...
-
What is the meaning of separation of powers?
-
Use regression analysis on deseasonalized demand to forecast demand in summer 2013, given the following historical demanddata: YEAR SEASON ACTUAL DEMAND 2011 Spring 205 Summer Winter Summer Winter...
-
A clothing company sells ski jackets every winter but must decide in the summer how many jackets to produce. Each jacket costs $65 to produce and ship and sells for $129 at retail stores. For the...
-
Develop a spreadsheet for computing the demand for any values of the input variables in the linear demand and nonlinear demand prediction models in Examples 1.7 and 1.8 in the chapter.
-
Onslow Co. purchases a used machine for $192,000 cash on January 2 and prepares it for use the next day at a cost of $8,000. On January 3, it is installed on a required operating platform costing...
-
Tableau DA C-3 (Static): Mini-Case, Reporting stock investments on financial statements LO P4 As financial reporting advisors, we are asked by the head of Sterling Co. to advise in accounting for...
-
Where is the Vendors center accessed in QuickBooks Online?
-
What is the main focus of incident reporting, occurrence reporting, and occurrence screening ?
-
What will be printed when the following code executes? xList [-1, 0, 1, 0, 2, 0, 3, 0, 4, 0, 5, 0,6] y = xList.pop(5) y=xList.insert( 6, 6) print(xList)
-
8. 0,1 5 0,1 9. Convert the NFA in question 8 to DFA, write the formal description of the machine.
-
1. A current I is flowing in the rectangular loop as shown. Find the magnetic field at point C a- C b
-
The electric field due to a line charge is given by where l is a constant. Show that E is solenoidal. Show that it is also conservative. E =
-
Thans grandmother dies and leaves him jewelry worth $40,000. In addition, he is the beneficiary of a $100,000 life insurance policy that his grandmother had bought before she retired. Identify the...
-
Art is in the 28% marginal tax bracket for 2011. He owes a $10,000 bill for business expenses. Because he reports taxable income on a cash basis, he can deduct the $10,000 in either 2011 or 2012,...
-
Marisa is an obstetrician. Every February, she attends a 3-day conference on financial planning with Ester, her college roommate. Ester is Marisas accountant and is a certified financial planner....
-
Calculate the reduction ratio \(r_{k}=\frac{f\left(X_{k} ight)-f\left(X_{k}+s_{k} ight)}{m_{k}\left(X_{k} ight)-m_{k}\left(X_{k}+s_{k} ight)}\) for the function given in problem 1 .
-
Discuss the effect of initial trust region radius (ITRR) on the performance of TR algorithm.
-
Find the maximum of the function using Trust region method \(f=15 x_{1}+8 x_{1} x_{2}+5 x_{2}\) subject to \(x_{1}+x_{2} \leq 10\)

Study smarter with the SolutionInn App