

Question: Question 2. 3-Robot Example from Last Week In the 3-Robot system of Question 2 of Assignment W1, you also need to implement a collision avoidance
Question 2. 3-Robot Example from Last Week
In the 3-Robot system of Question 2 of Assignment W1, you also need to implement a collision avoidance mechanism between Robots B and C in such a way that only one of them makes a move towards Robot A to fetch the wafers at a given time. Similarly, only one of them moves towards the wafer stack to deposit the wafers. A collision is defined to be the situation when both move towards Robot A to fetch a wafer or when both move towards the wafer stack at the same time.
Question from last week
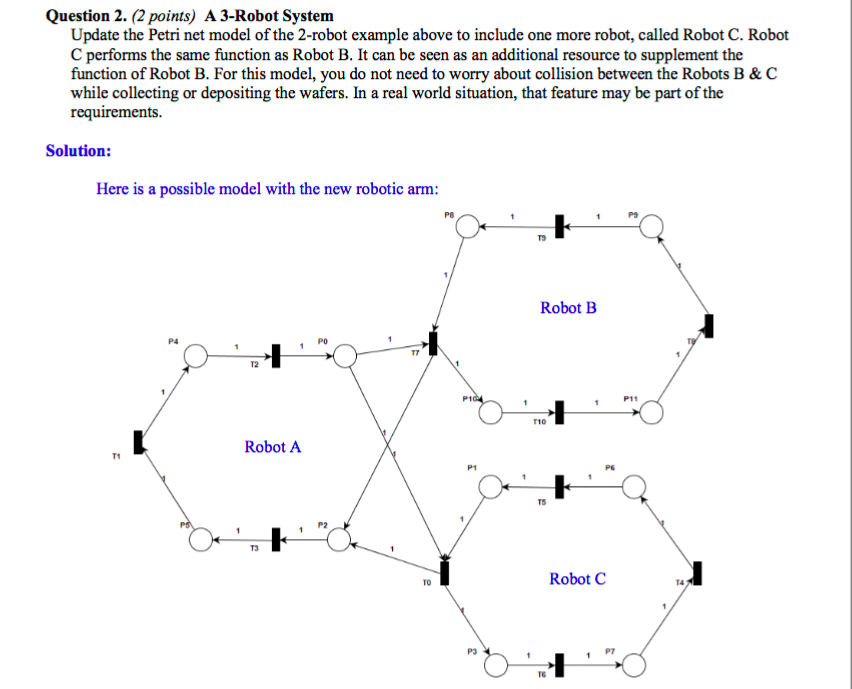
Question 2. (2 points) A3-Robot System Update the Petri net model of the 2-robot example above to include one more robot, called Robot C. Robot C performs the same function as Robot B. It can be seen as an additional resource to supplement the function of Robot B. For this model, you do not need to worry about collision between the Robots B & C while collecting or depositing the wafers. In a real world situation, that feature may be part of the requirements. Solution: Here is a possible model with the new robotic arm: P8 Robot B PO 12 P11 T10 Robot A T1 T3 Robot C P3 P7 Question 2. (2 points) A3-Robot System Update the Petri net model of the 2-robot example above to include one more robot, called Robot C. Robot C performs the same function as Robot B. It can be seen as an additional resource to supplement the function of Robot B. For this model, you do not need to worry about collision between the Robots B & C while collecting or depositing the wafers. In a real world situation, that feature may be part of the requirements. Solution: Here is a possible model with the new robotic arm: P8 Robot B PO 12 P11 T10 Robot A T1 T3 Robot C P3 P7
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts