

Question: Question 5 Figure 3 shows a link in a robot subject to two pure torques, due to the motors at the joints and a pure
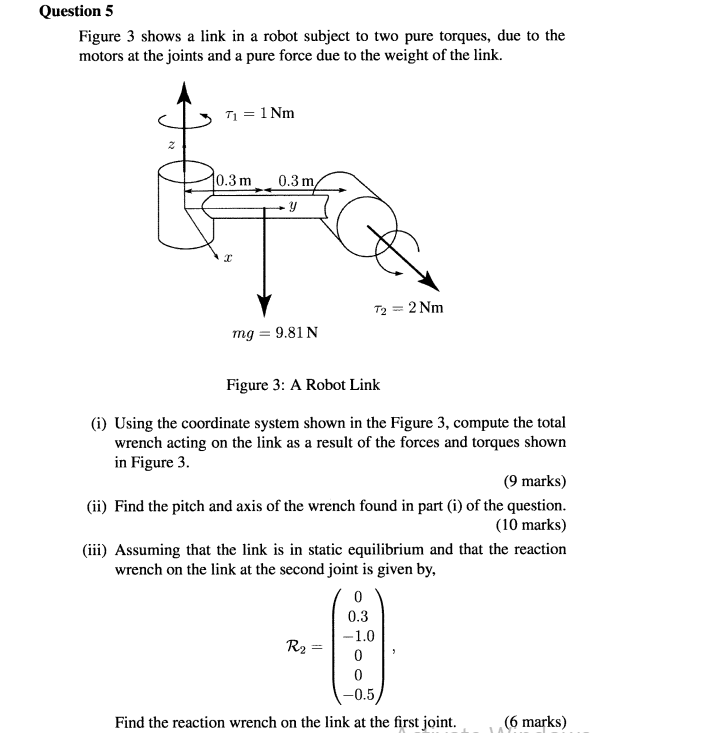
Question 5 Figure 3 shows a link in a robot subject to two pure torques, due to the motors at the joints and a pure force due to the weight of the link. T1 = 1 Nm 10.3 m 0.3 m y T2 = 2 Nm mg = 9.81N Figure 3: A Robot Link (1) Using the coordinate system shown in the Figure 3, compute the total wrench acting on the link as a result of the forces and torques shown in Figure 3. (9 marks) (ii) Find the pitch and axis of the wrench found in part (i) of the question. (10 marks) (iii) Assuming that the link is in static equilibrium and that the reaction wrench on the link at the second joint is given by, 0 0.3 -1.0 0 0 -0.5 Find the reaction wrench on the link at the first joint. (6 marks) - R2=
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts