

Question: Question B 2 . Consider the 5 - DoF robot arm shown in the Figure B 2 . The joint configuration vector of this robot
Question B
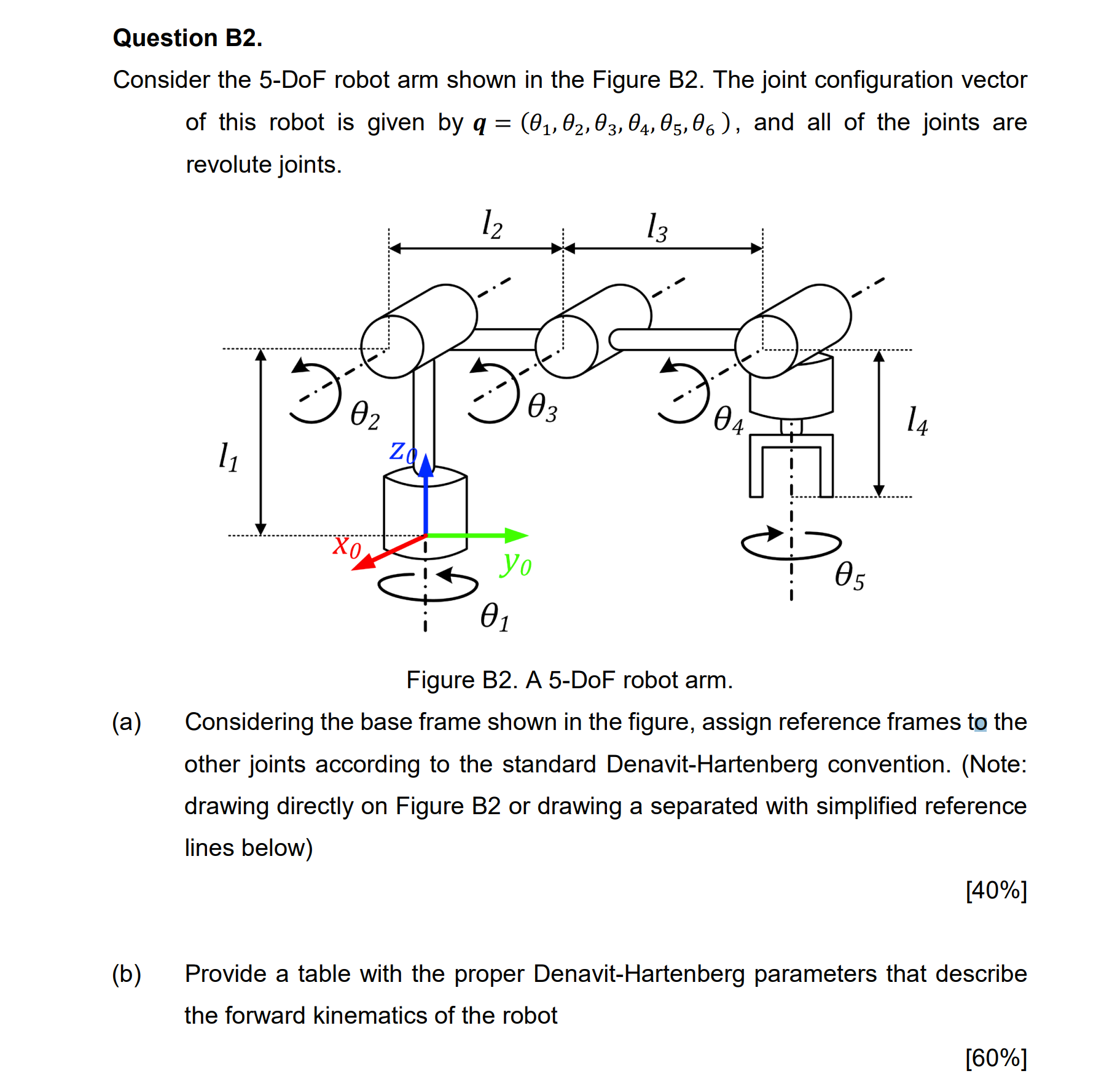
Consider the DoF robot arm shown in the Figure B The joint configuration vector of this robot is given by and all of the joints are revolute joints.
Figure B A DoF robot arm.
a Considering the base frame shown in the figure, assign reference frames to the other joints according to the standard DenavitHartenberg convention. Note: drawing directly on Figure B or drawing a separated with simplified reference lines below
b Provide a table with the proper DenavitHartenberg parameters that describe the forward kinematics of the robot
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock