

Question: represented by the dynamic equation: m l 2 = - mglsin - b + u Into a linear parameter - varying system given by: m
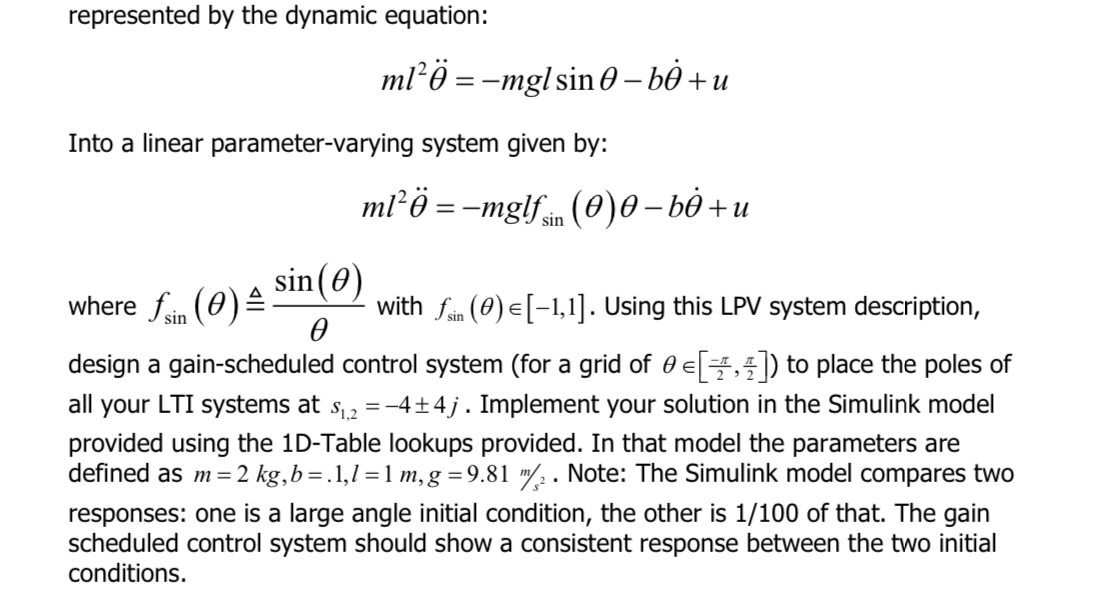
represented by the dynamic equation:
mglsin
Into a linear parametervarying system given by:
where with Using this LPV system description, design a gainscheduled control system for a grid of to place the poles of all your LTI systems at Implement your solution in the Simulink model provided using the DTable lookups provided. In that model the parameters are defined as Note: The Simulink model compares two responses: one is a large angle initial condition, the other is of that. The gain scheduled control system should show a consistent response between the two initial conditions.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock