

Question: required matlab code P = [ 75.1267 25.5095 50.5957 69.9077 89.0903 95.9291 54.7216 13.8624 14.9294 25.7508 84.0717 25.4282 81.4285 24.3525 92.9264 34.9984 19.6595 25.1084 61.6045
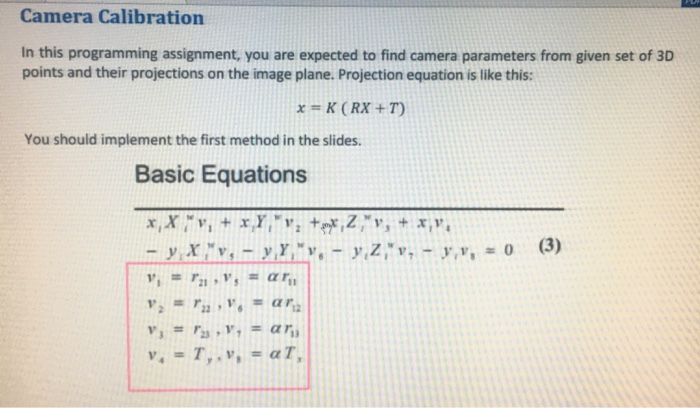
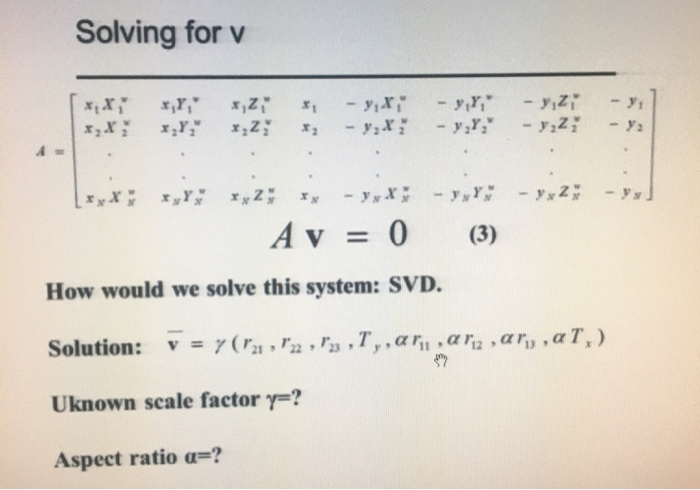
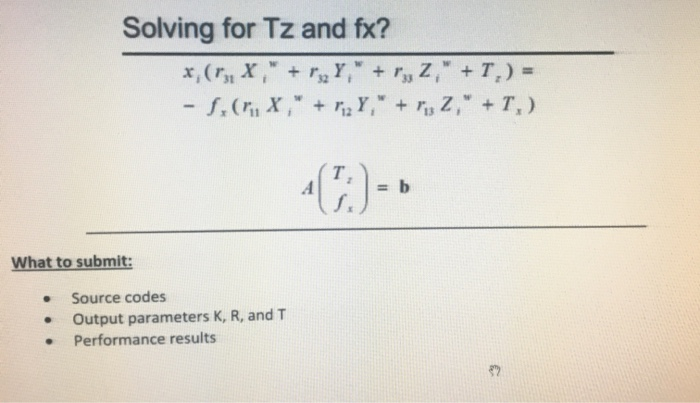
Camera Calibration In this programming assignment, you are expected to find camera parameters from given set of 3D points and their projections on the image plane. Projection equation is like this: x = K (RX + T) You should implement the first method in the slides. Basic Equations (3) x,X, + x Yv, + yle, 2,"v, + x,y, - yx", - yyy, - y Z' v, - y.v, = 0 v 21, V, - ar V = a.. - ar V = " , = ar v. = T,, = at, Solving for v *;27" 1,2; - yx, - Yox - ,,r," - y, Zi - y,Y;" y, 27 IN - y x - y Y, - P2 A v = 0 (3) How would we solve this system: SVD. Solution: v = y('a , r'n, Pus ,T,, ar, ara, ar, ,aT.) Uknown scale factor y=? Aspect ratio a=? Solving for Tz and fx? x,(rX," + r.,Y," + ruz" +T,) = - f.(n,x," + rY," + rusz," + T.) (1) - = b What to submit: . . Source codes Output parameters K, R, and T Performance results . Camera Calibration In this programming assignment, you are expected to find camera parameters from given set of 3D points and their projections on the image plane. Projection equation is like this: x = K (RX + T) You should implement the first method in the slides. Basic Equations (3) x,X, + x Yv, + yle, 2,"v, + x,y, - yx", - yyy, - y Z' v, - y.v, = 0 v 21, V, - ar V = a.. - ar V = " , = ar v. = T,, = at, Solving for v *;27" 1,2; - yx, - Yox - ,,r," - y, Zi - y,Y;" y, 27 IN - y x - y Y, - P2 A v = 0 (3) How would we solve this system: SVD. Solution: v = y('a , r'n, Pus ,T,, ar, ara, ar, ,aT.) Uknown scale factor y=? Aspect ratio a=? Solving for Tz and fx? x,(rX," + r.,Y," + ruz" +T,) = - f.(n,x," + rY," + rusz," + T.) (1) - = b What to submit: . . Source codes Output parameters K, R, and T Performance results
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts