

Question: result for the first set of data should be: The robot should turn -80.56 degrees with a magnitude of 0.98) This is a programming assignment.
result for the first set of data should be: The robot should turn -80.56 degrees with a magnitude of 0.98)
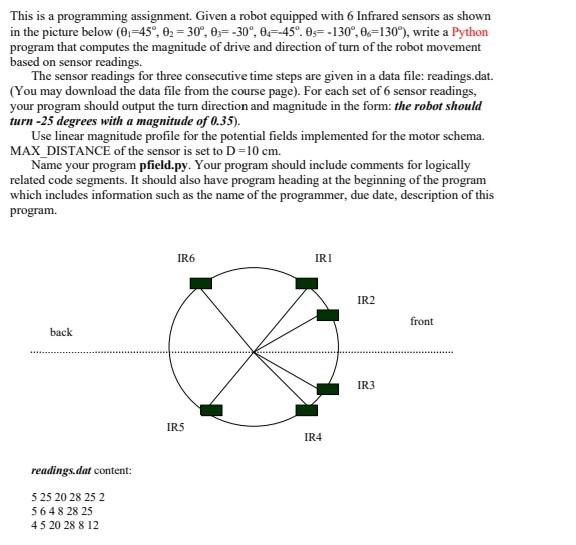
This is a programming assignment. Given a robot equipped with 6 Infrared sensors as shown in the picture below (0=45, 02 = 30, 0;=-30, 6:=-45. Os=-130,&=130%), write a Python program that computes the magnitude of drive and direction of turn of the robot movement based on sensor readings. The sensor readings for three consecutive time steps are given in a data file: readings.dat. (You may download the data file from the course page). For each set of 6 sensor readings, your program should output the turn direction and magnitude in the form: the robot should turn-25 degrees with a magnitude of 0.35). Use linear magnitude profile for the potential fields implemented for the motor schema. MAX DISTANCE of the sensor is set to D=10 cm. Name your program pfield.py. Your program should include comments for logically related code segments. It should also have program heading at the beginning of the program which includes information such as the name of the programmer, due date, description of this program. IR6 IRI IR2 front back IR3 IRS IR4 readings.dat content: 5 25 20 28 25 2 564 8 28 25 45 20 28 8 12 This is a programming assignment. Given a robot equipped with 6 Infrared sensors as shown in the picture below (0=45, 02 = 30, 0;=-30, 6:=-45. Os=-130,&=130%), write a Python program that computes the magnitude of drive and direction of turn of the robot movement based on sensor readings. The sensor readings for three consecutive time steps are given in a data file: readings.dat. (You may download the data file from the course page). For each set of 6 sensor readings, your program should output the turn direction and magnitude in the form: the robot should turn-25 degrees with a magnitude of 0.35). Use linear magnitude profile for the potential fields implemented for the motor schema. MAX DISTANCE of the sensor is set to D=10 cm. Name your program pfield.py. Your program should include comments for logically related code segments. It should also have program heading at the beginning of the program which includes information such as the name of the programmer, due date, description of this program. IR6 IRI IR2 front back IR3 IRS IR4 readings.dat content: 5 25 20 28 25 2 564 8 28 25 45 20 28 8 12
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts