

Question: Simple two-link robot arm of Fig. 9.4 a) Plot the gravity load as a function of both joint angles. Assume m = 0.45 kg,

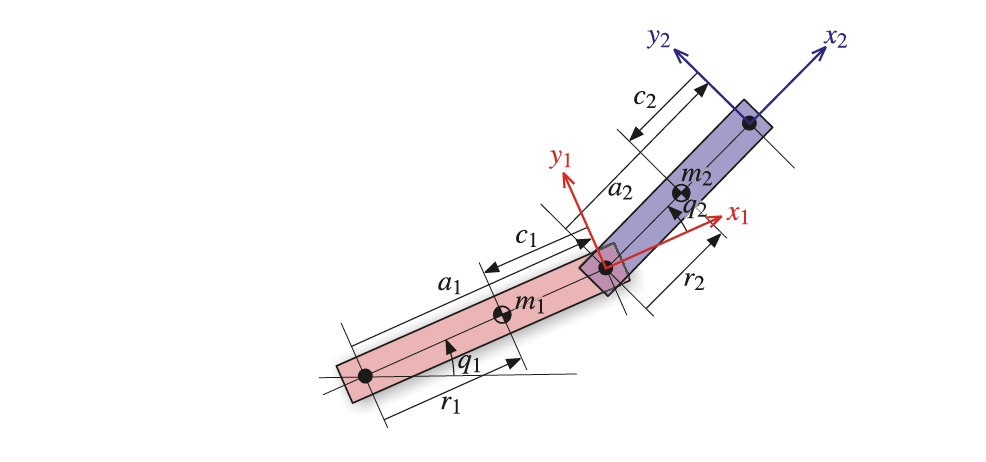
Simple two-link robot arm of Fig. 9.4 a) Plot the gravity load as a function of both joint angles. Assume m = 0.45 kg, m2 = 0.35 kg, r = 8 cm and r = 8 cm. b) Plot the inertia for joint 1 as a function of q2. To compute link inertia assume that we can model the link as a point mass located at the center of mass. y2. 02 m2 91 m r2 X1
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock