

Question: solve and provide the matlab code Problem 3.5 (Primitive Block Diagrams) We say that a Block Diagram is Primitive if the following are all satisfied:
solve and provide the matlab code
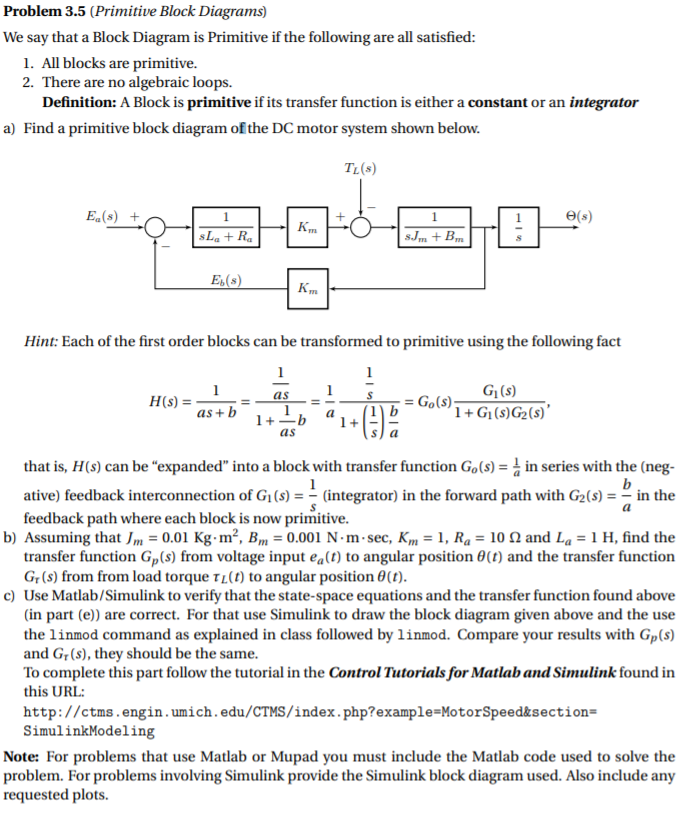
Problem 3.5 (Primitive Block Diagrams) We say that a Block Diagram is Primitive if the following are all satisfied: 1. All blocks are primitive 2. There are no algebraic loops. Definition: A Block is primitive if its transfer function is either a constant or an integrator Find a primitive block diagram of the DC motor system shown below a) TL(s) Ea(s)+ e(s) sLa Ra Hint: Each of the first order blocks can be transformed to primitive using the following fact GI(s) that is, H(s) can be "expanded" into a block with transfer function Go(s)in series with the (neg ative) feedback interconnection of G()(integrator) in the forward path with Gzls)- in the feedback path where each block is now primitive. b) Assuming that J,,-0.01 Kg-m2, Bm-0.001 N. m. sec, Km-1, Ra-10 and La-1H, find the transfer function Gp(s) from voltage input ea (t) to angular position (t) and the transfer function Gr(s) from from load torque 1(1) to angular position (t) Use Matlab/Simulink to verify that the state-space equations and the transfer function found above (in part (e)) are correct. For that use Simulink to draw the block diagram given above and the use the linmod command as explained in class followed by 1inmod. Compare your results with Gp(s) and Gr(s), they should be the same. To complete this part follow the tutorial in the Control Tutorials for Matlab and Simulink found in this URL http://ctms.engin. umich.edu/CTMS/index.php?example-MotorSpeed§ion SimulinkModeling c) Note: For problems that use Matlab or Mupad you must include the Matlab code used to solve the problem. For problems involving Simulink provide the Simulink block diagram u requested plots. sed. Also include any Problem 3.5 (Primitive Block Diagrams) We say that a Block Diagram is Primitive if the following are all satisfied: 1. All blocks are primitive 2. There are no algebraic loops. Definition: A Block is primitive if its transfer function is either a constant or an integrator Find a primitive block diagram of the DC motor system shown below a) TL(s) Ea(s)+ e(s) sLa Ra Hint: Each of the first order blocks can be transformed to primitive using the following fact GI(s) that is, H(s) can be "expanded" into a block with transfer function Go(s)in series with the (neg ative) feedback interconnection of G()(integrator) in the forward path with Gzls)- in the feedback path where each block is now primitive. b) Assuming that J,,-0.01 Kg-m2, Bm-0.001 N. m. sec, Km-1, Ra-10 and La-1H, find the transfer function Gp(s) from voltage input ea (t) to angular position (t) and the transfer function Gr(s) from from load torque 1(1) to angular position (t) Use Matlab/Simulink to verify that the state-space equations and the transfer function found above (in part (e)) are correct. For that use Simulink to draw the block diagram given above and the use the linmod command as explained in class followed by 1inmod. Compare your results with Gp(s) and Gr(s), they should be the same. To complete this part follow the tutorial in the Control Tutorials for Matlab and Simulink found in this URL http://ctms.engin. umich.edu/CTMS/index.php?example-MotorSpeed§ion SimulinkModeling c) Note: For problems that use Matlab or Mupad you must include the Matlab code used to solve the problem. For problems involving Simulink provide the Simulink block diagram u requested plots. sed. Also include any
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts