

Question: Solve Example 6.2 on page 111 of textbook, using (1) the 4th order Runge Kutta method and (2) Simulink method, respectively. Please submit your MATLAB
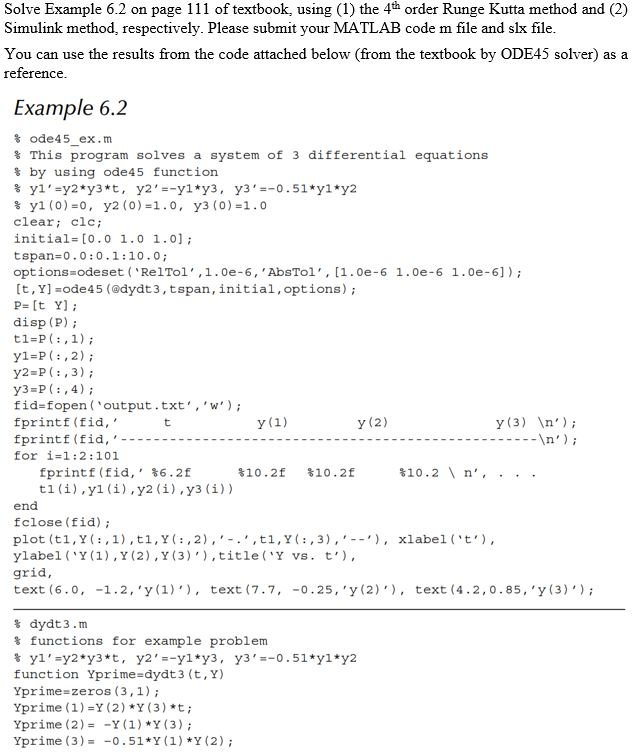
Solve Example 6.2 on page 111 of textbook, using (1) the 4th order Runge Kutta method and (2) Simulink method, respectively. Please submit your MATLAB code m file and slx file You can use the results from the code attached below (from the textbook by ODE45 solver) as a reference Example 6.2 ode45 ex.m % This program solves a system of 3 differential equations % by using ode45 function % y1 (0)=0, y2 (0)=1.0, y3 (0)=1.0 clear; clc initial [0.0 1.0 1.0] tspan 0.0:0.1:10.0; options-odeset ('RelTol',1.0e-6, 'AbsTol', [1.0e-6 1.0e-6 1.0e-6]) [t, Y] ode45 (@dydt3,tspan, initial,options) disp (P) y1 P(,2) y2-P(:,3) y3 P:,4) fid-fopen (output.txt,'w) fprintf (fid,' y (2) y (3) n') for i=1 :2 : 101 fprintf (fid,' %6.2f %10.2f %10.2f 10.2 \ n' end fclose (fid)i plot (tl, Y(),t1,Y(, 2),'-.',ti,Y:,3),), xlabelt, ylabel (Y(1),Y (2), Y (3)),titleY vs. t grid, text (6.o, -1.2, 'y (1), text (7.7, -0.25, 'y (2), text (4.2,0.85, 'y (3) % dydt3.m % functions for example problem function Yprime-dydt3 (t, Y) Yprime-zeros (3,1) Yprime (1)-Y (2) Y (3) t; yprime (2)--Y(1)*Y (3); Yprime (3)-0.51*Y (1) Y (2)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts