

Question: Camera intrinsics K Camera Coordinates d 3D Rotation R 3D Translation t Image pixel (x, y)T 3D point? World Coordinates Figure 2: Backprojection of
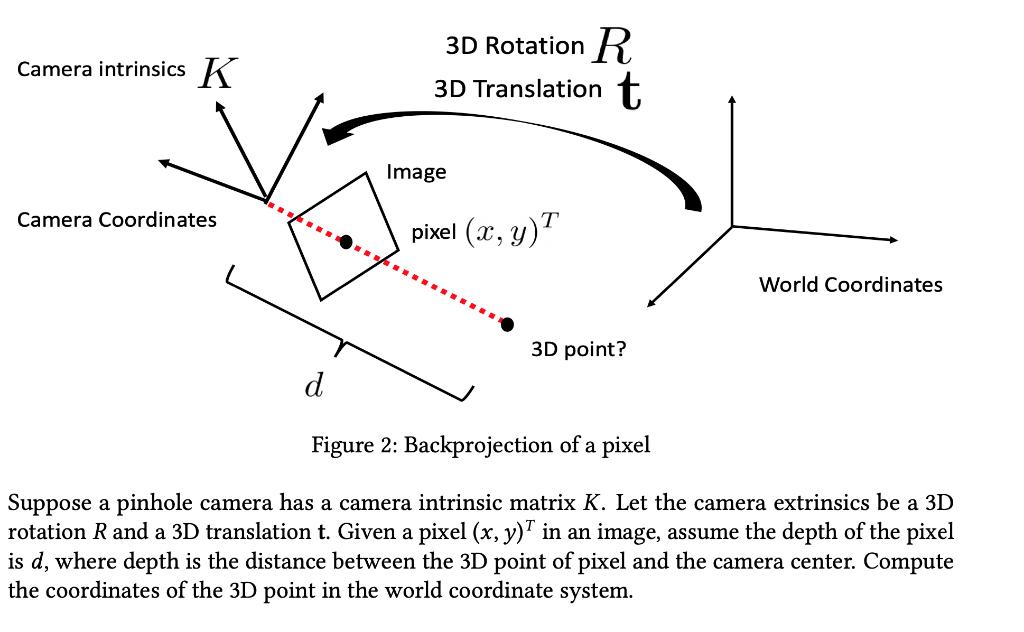
Camera intrinsics K Camera Coordinates d 3D Rotation R 3D Translation t Image pixel (x, y)T 3D point? World Coordinates Figure 2: Backprojection of a pixel Suppose a pinhole camera has a camera intrinsic matrix K. Let the camera extrinsics be a 3D rotation R and a 3D translation t. Given a pixel (x, y) in an image, assume the depth of the pixel is d, where depth is the distance between the 3D point of pixel and the camera center. Compute the coordinates of the 3D point in the world coordinate system.
Step by Step Solution
3.48 Rating (148 Votes )
There are 3 Steps involved in it
Camera Intrinstic Matrix K The intrinstic matrix trans forms 3D came... View full answer

Get step-by-step solutions from verified subject matter experts