

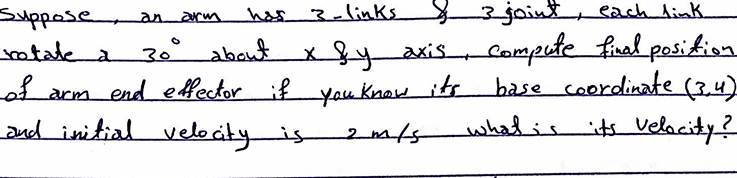
Question: Suppose, an arm has 3 - links 3 - joint, each link rotate a ( 3 0 ^ { circ } )
Suppose, an arm has links joint, each link rotate a circ about x & y axis, compute final position of arm end effector if youknow its base coordinate and initial velocity is mathrm~mmathrms what is its velacity?
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock