Question: t in the priority queue . Questions, part I (planning) 1. (15 points) A planar manipulator robot consisting of two links with 2 revolute joints,
t in the priority queue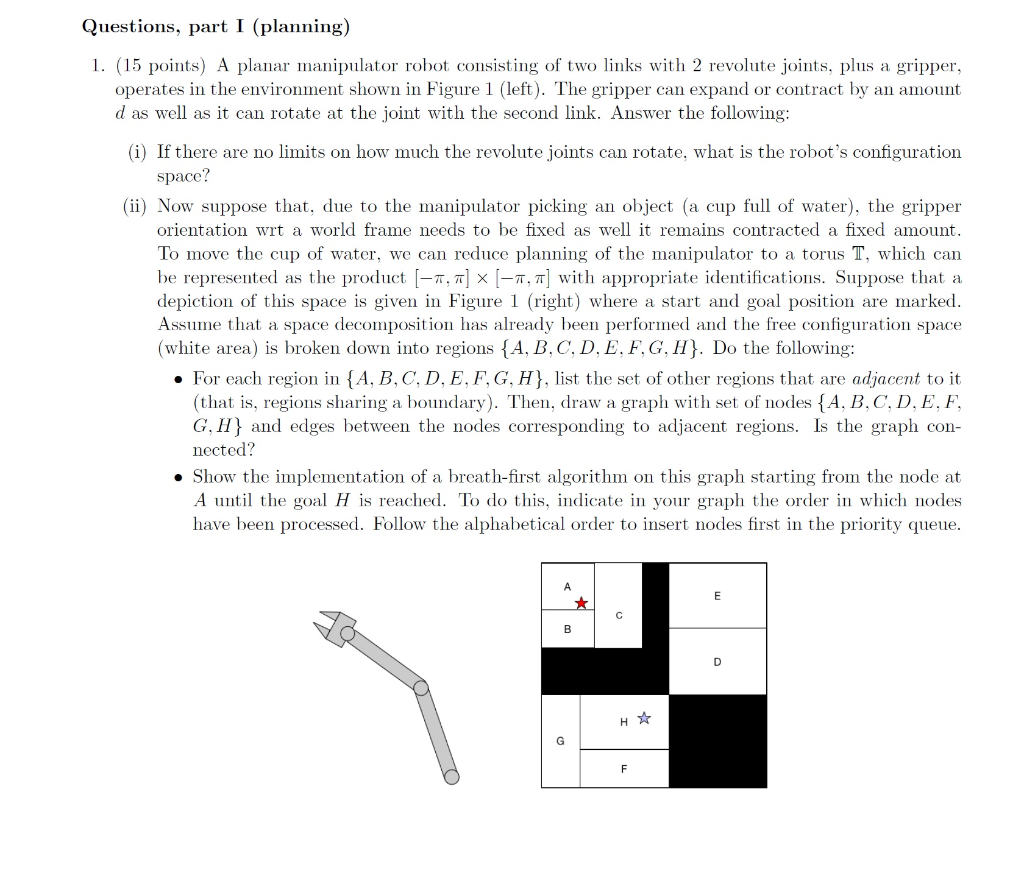 .
.
Questions, part I (planning) 1. (15 points) A planar manipulator robot consisting of two links with 2 revolute joints, plus a gripper, operates in the environment shown in Figure l (left). The gripper can expand or contract by an amount d as well as it can rotate at the joint with the second link. Answer the following: (i) If there are no limits on how much the revolute joints can rotate, what is the robot's configuration space? (ii) Now suppose that, due to the manipulator picking an object (a cup full of water), the gripper orientation wrt a world frame needs to be fixed as well it remains contracted a fixed amount. To move the cup of water, we can reduce planning of the manipulator to a torus T, which can be represented as the product (-7,7] [-7, ] with appropriate identifications. Suppose that a depiction of this space is given in Figure 1 (right) where a start and goal position are marked. Assume that a space decomposition has already been performed and the free configuration space (white area) is broken down into regions {A, B, C, D, E, F, G, H}. Do the following: For each region in {A, B, C, D, E, F, G, H}, list the set of other regions that are adjacent to it (that is, regions sharing a boundary). Then, draw a graph with set of nodes {A, B, C, D, E, F, G, H} and edges between the nodes corresponding to adjacent regions. Is the graph con- nected? Show the implementation of a breath-first algorithm on this graph starting from the node at A until the goal H is reached. To do this, indicate in your graph the order in which nodes have been processed. Follow the alphabetical order to insert nodes first in the priority queue. H * Questions, part I (planning) 1. (15 points) A planar manipulator robot consisting of two links with 2 revolute joints, plus a gripper, operates in the environment shown in Figure l (left). The gripper can expand or contract by an amount d as well as it can rotate at the joint with the second link. Answer the following: (i) If there are no limits on how much the revolute joints can rotate, what is the robot's configuration space? (ii) Now suppose that, due to the manipulator picking an object (a cup full of water), the gripper orientation wrt a world frame needs to be fixed as well it remains contracted a fixed amount. To move the cup of water, we can reduce planning of the manipulator to a torus T, which can be represented as the product (-7,7] [-7, ] with appropriate identifications. Suppose that a depiction of this space is given in Figure 1 (right) where a start and goal position are marked. Assume that a space decomposition has already been performed and the free configuration space (white area) is broken down into regions {A, B, C, D, E, F, G, H}. Do the following: For each region in {A, B, C, D, E, F, G, H}, list the set of other regions that are adjacent to it (that is, regions sharing a boundary). Then, draw a graph with set of nodes {A, B, C, D, E, F, G, H} and edges between the nodes corresponding to adjacent regions. Is the graph con- nected? Show the implementation of a breath-first algorithm on this graph starting from the node at A until the goal H is reached. To do this, indicate in your graph the order in which nodes have been processed. Follow the alphabetical order to insert nodes first in the priority queue. H *


