

Question: The parameterized plant G(s) is now to be controlled using lag compensation as shown in the figure below. R(s) C(s) G(s) Y(s) S+ZC Your
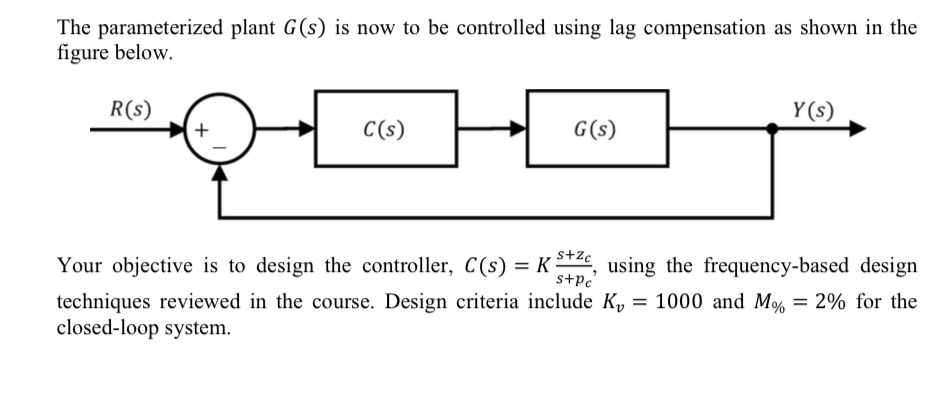
The parameterized plant G(s) is now to be controlled using lag compensation as shown in the figure below. R(s) C(s) G(s) Y(s) S+ZC Your objective is to design the controller, C(s) = K +zc, using the frequency-based design s+Pc techniques reviewed in the course. Design criteria include K = 1000 and M% = 2% for the closed-loop system.
Step by Step Solution
3.43 Rating (159 Votes )
There are 3 Steps involved in it
To design a lag compensator for the given plant Gs using frequencybased design techniques we can fol... View full answer

Get step-by-step solutions from verified subject matter experts
Document Format (2 attachments)
663d4369d9056_968676.pdf
180 KBs PDF File
663d4369d9056_968676.docx
120 KBs Word File