

Question: The pendulum shown in Fig. 1 has a mass, m, attached to a frictionless pivot, point O, through a massless bar whose length is
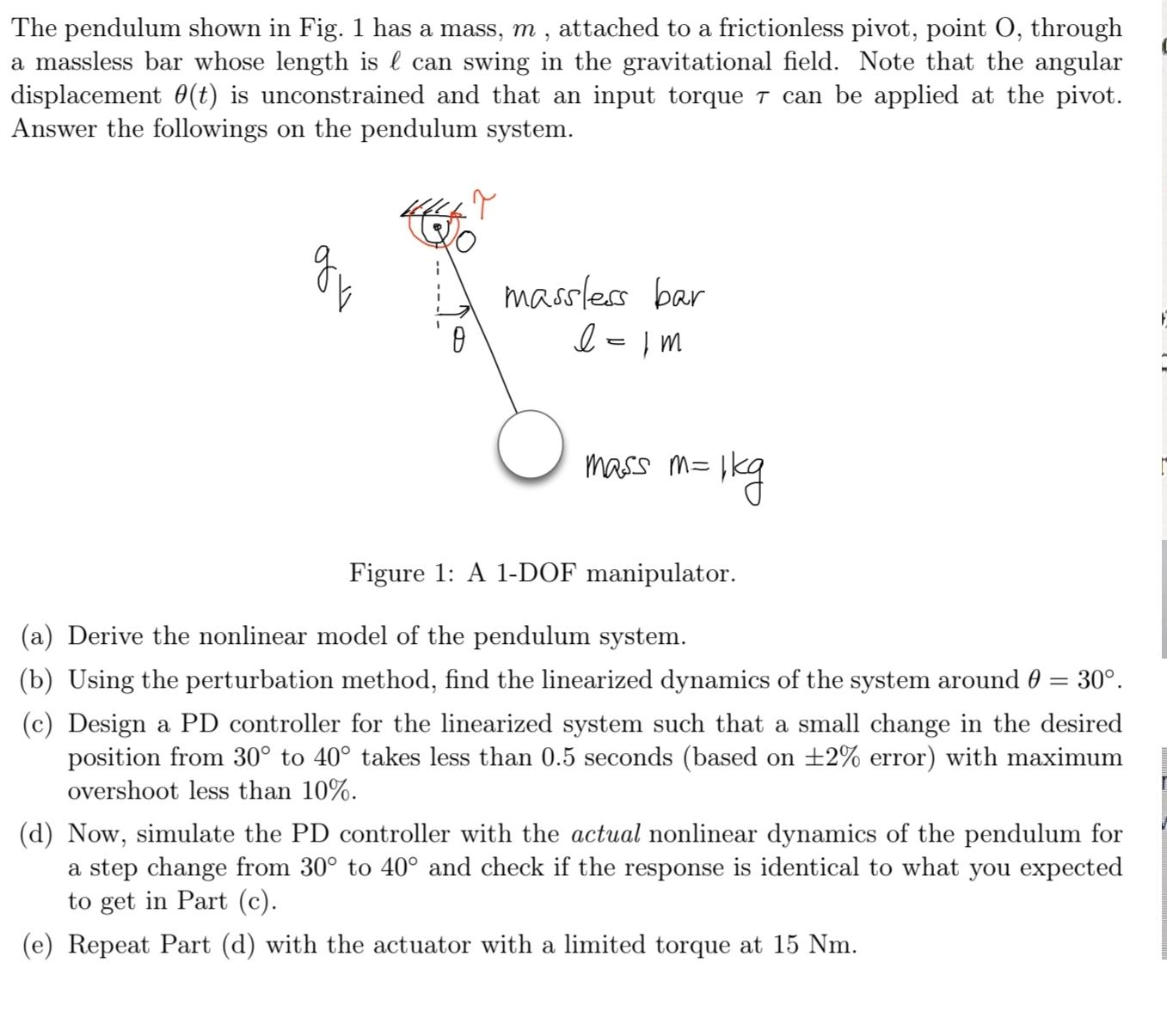
The pendulum shown in Fig. 1 has a mass, m, attached to a frictionless pivot, point O, through a massless bar whose length is can swing in the gravitational field. Note that the angular displacement (t) is unconstrained and that an input torque 7 can be applied at the pivot. Answer the followings on the pendulum system. ~ massless bar l = 1 m O m=1kg mass m= Figure 1: A 1-DOF manipulator. 30. (a) Derive the nonlinear model of the pendulum system. (b) Using the perturbation method, find the linearized dynamics of the system around (c) Design a PD controller for the linearized system such that a small change in the desired position from 30 to 40 takes less than 0.5 seconds (based on 2% error) with maximum overshoot less than 10%. = (d) Now, simulate the PD controller with the actual nonlinear dynamics of the pendulum for a step change from 30 to 40 and check if the response is identical to what you expected to get in Part (c). (e) Repeat Part (d) with the actuator with a limited torque at 15 Nm. F = [
Step by Step Solution
3.54 Rating (158 Votes )
There are 3 Steps involved in it
a The nonlinear model of the pendulum system is ml2mgrsin Where is the ang... View full answer

Get step-by-step solutions from verified subject matter experts