

Question: Thymio II robot example_code # You may need to import some classes of the controller module. Ex: # from controller import Robot, Motor from controller
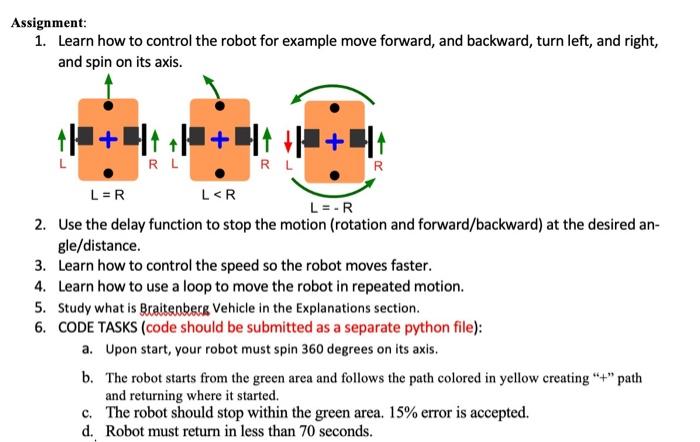
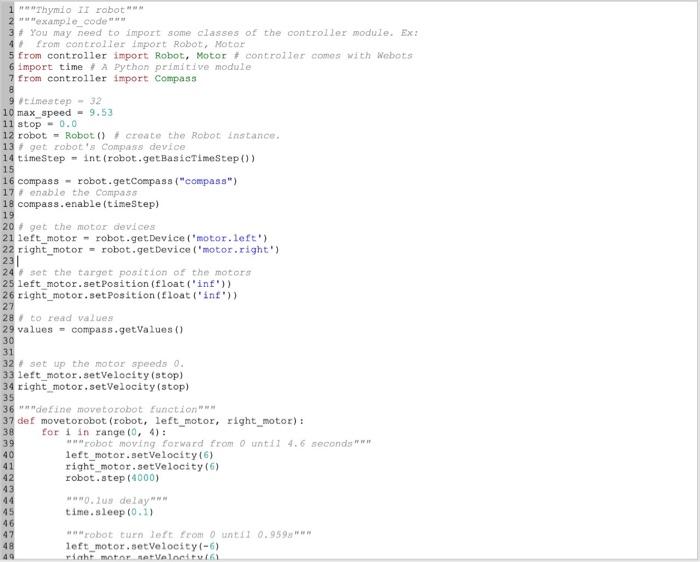
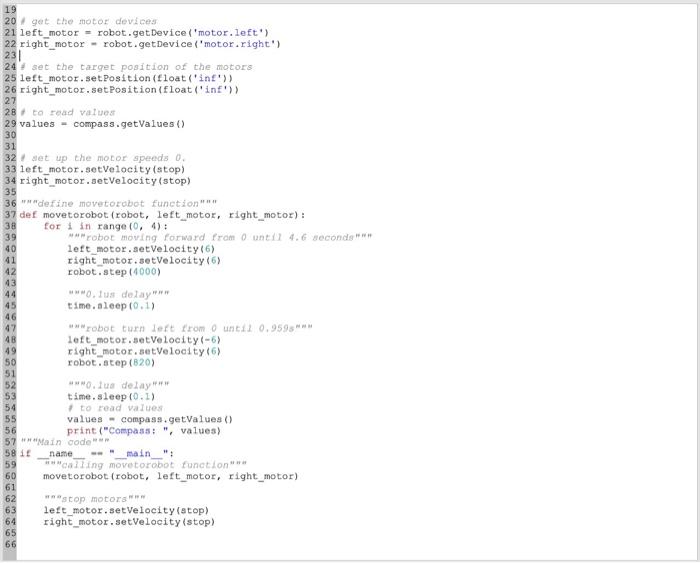
Assignment: 1. Learn how to control the robot for example move forward, and backward, turn left, and right, and spin on its axis. 2. Use the delay function to stop the motion (rotation and forward/backward) at the desired angle/distance. 3. Learn how to control the speed so the robot moves faster. 4. Learn how to use a loop to move the robot in repeated motion. 5. Study what is Braitenberg Vehicle in the Explanations section. 6. CODE TASKS (code should be submitted as a separate python file): a. Upon start, your robot must spin 360 degrees on its axis. b. The robot starts from the green area and follows the path colored in yellow creating "+" path and returning where it started. c. The robot should stop within the green area. 15% error is accepted. d. Robot must return in less than 70 seconds
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts