

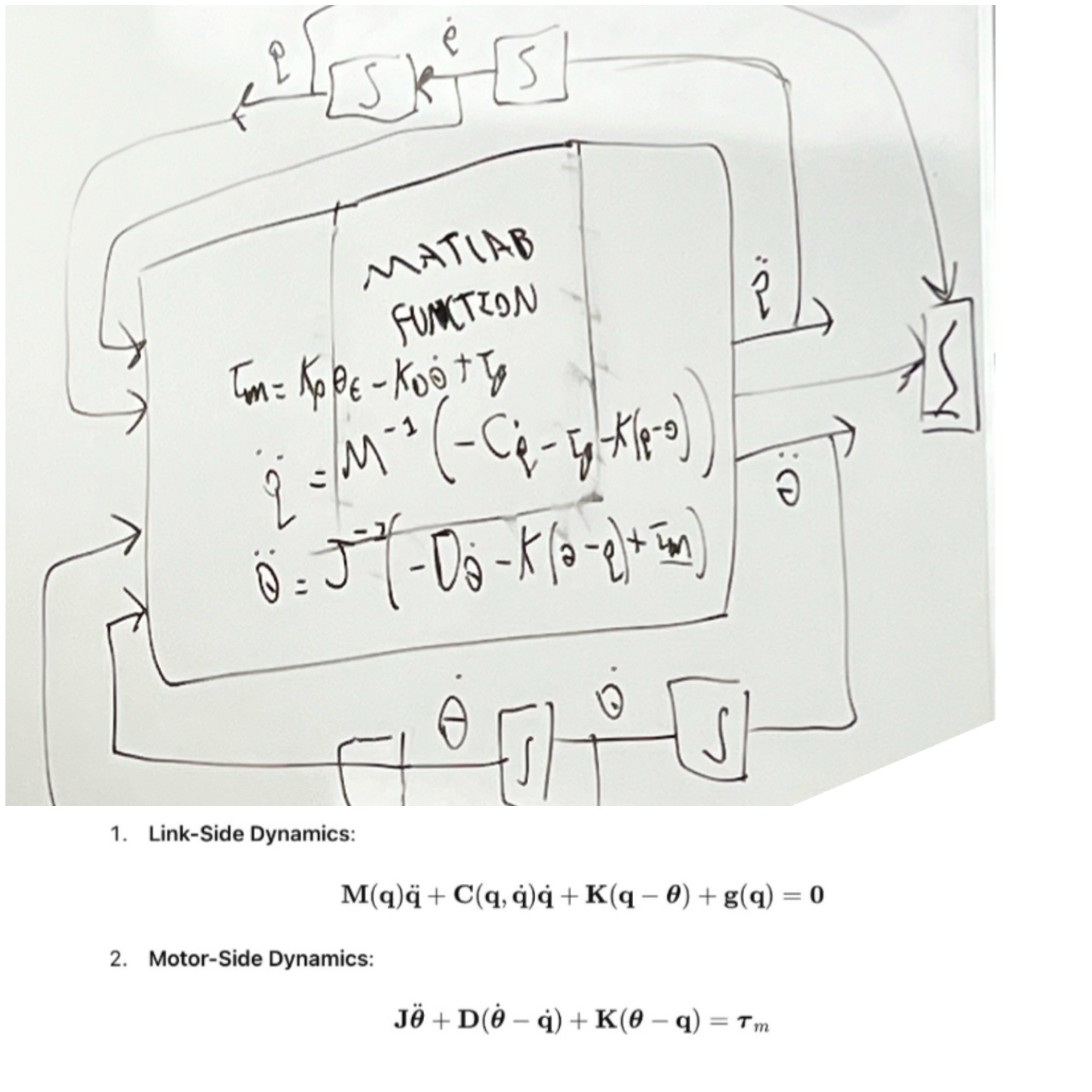
Question: Using a Matlab function block in simscape / simulink , simulate a two link manipulator using lagrangian mechanics for link andLink - Side Dynamics: M
Using a Matlab function block in simscapesimulink simulate a two link manipulator using lagrangian mechanics for link andLinkSide Dynamics:
MotorSide Dynamics:
motor side dynamics in javascript
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock