

Question: Using matlab simulink and simscape, simulate a robotic manipulator that has two links with masses ( M 1 , M 2 ) lengths ( L
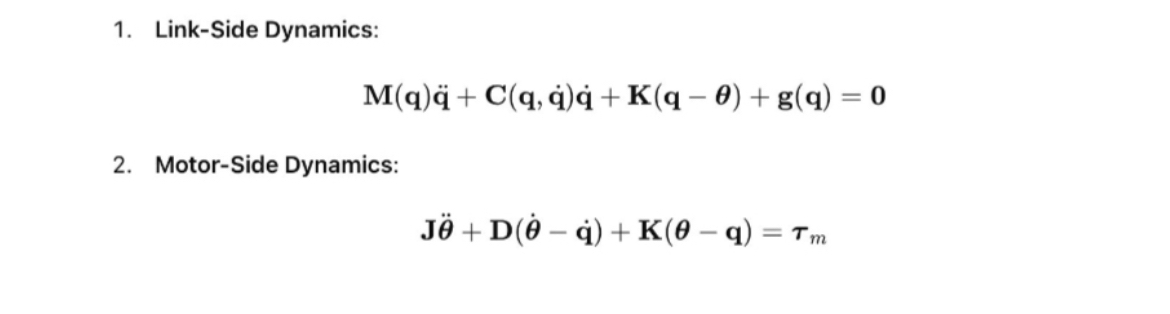
Using matlab simulink and simscape, simulate a robotic manipulator that has two links with masses MM lengths L L damping coefficients bb spring stiffness spring spring and gravity g any values can be given for masses, damping coefficients, spring stiffness and gravity. The manipulator's dynamics can be modeled using Lagrangian mechanics for the link and motor side dynamics: LinkSide Dynamics:
MotorSide Dynamics:
Select values for the initial conditions, q qdot, theta and thetadot to simulate dynamic behaviour and get desired behaviour
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock