

Question: Video Link: https://youtu.be/KliDi-AyQmw create some math library functions for converting between rotation angles. Beginning Steps: Organize the three angles into a struct we will call
Video Link: https://youtu.be/KliDi-AyQmw
create some math library functions for converting between rotation angles.
Beginning Steps:
Organize the three angles into a struct we will call Euler.
Contains three doubles, yaw, pitch and roll.
typedef struct
{
double yaw;
double pitch;
double roll;
} Euler;
Define the struct at the top of the file.
Also define PI:
#define PI 3.1415926535897932
Create the following functions:RadiansToDegrees
INPUT: One Euler variable
OUTPUT: Euler variable converted to degrees
degrees.yaw = radians.yaw * 180.0 / PI
Repeat for pitch and roll
DegreesToRadians
INPUT: One Euler variable
OUTPUT: Euler variable converted to radians
radians.yaw = degrees.yaw * PI / 180.0
Repeat for pitch and roll
PrintAngles
INPUT: One Euler variable
OUTPUT: void
Prints the angles (yaw, pitch, roll)
Within your main function:Create three Euler variables.
One to hold the initial angle which will be in degrees.
One to hold the result of DegreesToRadians().
One to hold the result of RadiansToDegrees().
Prompt to user to enter three values in degrees (using scanf) and save what they enter to your initial Euler variable.
You may assume that the user will only enter values from 0-360 degrees.
Call DegreesToRadians with the initial angle. Save the result to your Euler variable that will hold radians.
Call RadiansToDegrees with your radians variable. Save the result to your Euler veriable that will hold degrees.
Call PrintVector to print the result from DegreesToRadians.
Call PrintVector to print the result from RadiansToDegrees.
Note: The degrees value may not match what was initially entered, but it should be close.
EXTRA CREDIT : You will receive 5 extra points if you manage to define ALL of the functions in this homework with const and pass by reference.
References: If you are not familiar with angles as represented in radians or degrees I highly recommend taking a look at these links:
https://www.mathsisfun.com/geometry/degrees.html https://www.mathsisfun.com/geometry/radians.html
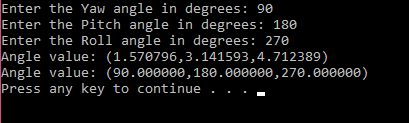
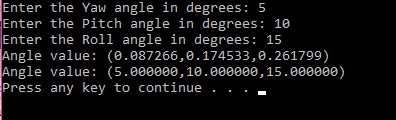
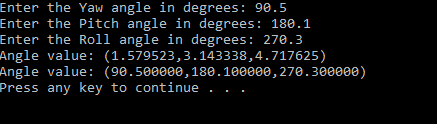
Enter the Yaw angle in degrees: 90 Enter the Pitch angle in degrees: 180 Enter the Roll angle in degrees: 270 Angle value: (1.570796,3.141593,4.712389) Angle value: (90.000000,180.000000,27e.000000) Press any key to continue
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts