

Question: We have discussed a rotational plane sweep algorithm to find the set of visible obstacle vertices from a point, VISIBLEVERTICES(p, S), for a given point
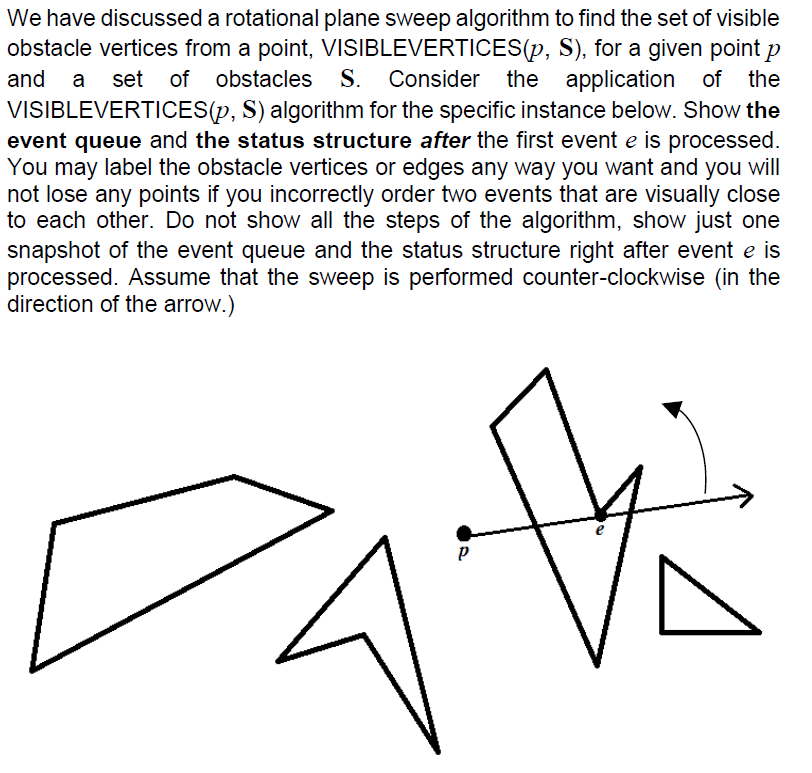
We have discussed a rotational plane sweep algorithm to find the set of visible obstacle vertices from a point, VISIBLEVERTICES(p, S), for a given point p and a set of obstacles S. Consider the application of the VISIBLEVERTICES(p, S) algorithm for the specific instance below. Show the event queue and the status structure after the first event e is processed. You may label the obstacle vertices or edges any way you want and you will not lose any points if you incorrectly order two events that are visually close to each other. Do not show all the steps of the algorithm, show just one snapshot of the event queue and the status structure right after event e is processed. Assume that the sweep is performed counter-clockwise (in the direction of the arrow.) We have discussed a rotational plane sweep algorithm to find the set of visible obstacle vertices from a point, VISIBLEVERTICES(p, S), for a given point p and a set of obstacles S. Consider the application of the VISIBLEVERTICES(p, S) algorithm for the specific instance below. Show the event queue and the status structure after the first event e is processed. You may label the obstacle vertices or edges any way you want and you will not lose any points if you incorrectly order two events that are visually close to each other. Do not show all the steps of the algorithm, show just one snapshot of the event queue and the status structure right after event e is processed. Assume that the sweep is performed counter-clockwise (in the direction of the arrow.)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts