

Question: Will rate and upvote, thanks! Assign and draw the frames on this three - link robot shown below, using the DH convention with the given
Will rate and upvote, thanks!
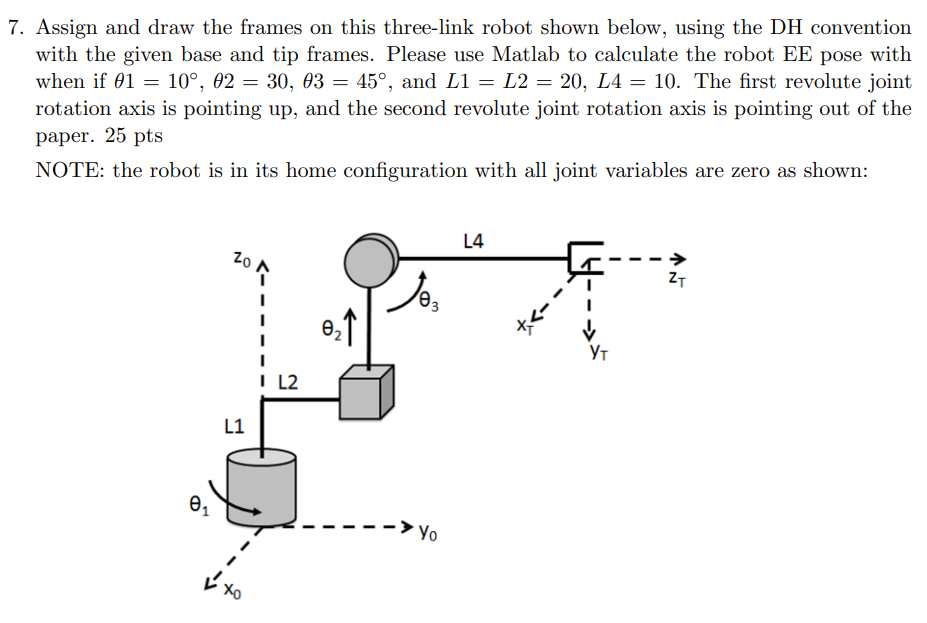
Assign and draw the frames on this threelink robot shown below, using the DH convention with the given base and tip frames. Please use MATLAB to calculate the robot EE pose with when if and The first revolute joint rotation axis is pointing up and the second revolute joint rotation axis is pointing out of the paper.
NOTE: the robot is in its home configuration with all joint variables are zero as shown:
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock