

Question: . Write a function PUMAfwd) to compute the forward kinematics of PUMA560 with the joint angles' values as input and the homogeneous transform of frame
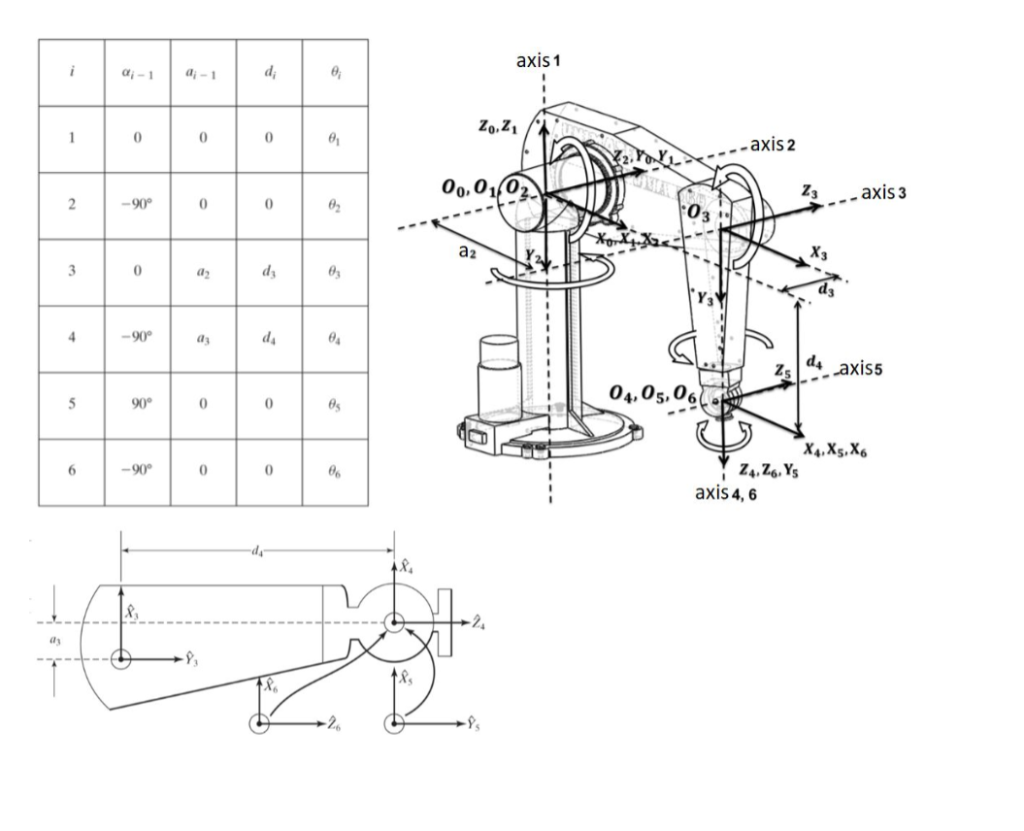
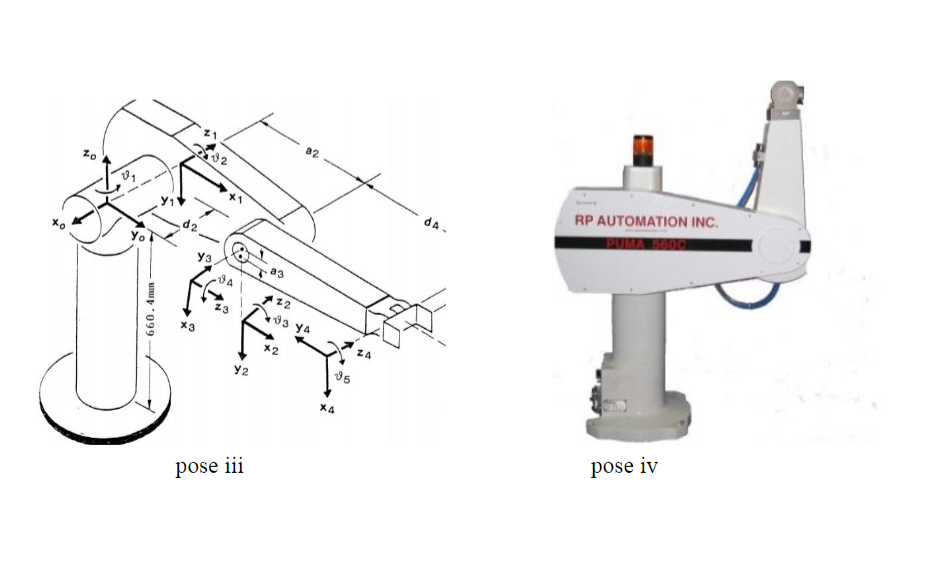
. Write a function PUMAfwd) to compute the forward kinematics of PUMA560 with the joint angles' values as input and the homogeneous transform of frame 63 relative to the base frame 0 Plot the pose of the manipulator in 3D. a2 -431.8mm; a3 - 20.32mm; d3 -124.4mm; d4- 431.8mm; i) all joint angles are zero. ii) all joint angles are 90. iii) plot the pose similar to the figure shown as "pose ii" iv) plot the pose similar to the figure shown as "pose iv". v) plot a pose that you like ( different from poses i to iv) axis1 4-1 4-1 Zo.Z / 0, axis 00.0- 2.-axiss Z3 -90 0 a2 Xg dy ds 90 a3 0495,06 90 0 x4,Xs,X6 6-90 axis4, 6 Rs Z 1 #2 192 RP AUTOMATION INC d4 a3 Z3 3 X2 Z4 Y2 5 x4 pose iv pose 111 . Write a function PUMAfwd) to compute the forward kinematics of PUMA560 with the joint angles' values as input and the homogeneous transform of frame 63 relative to the base frame 0 Plot the pose of the manipulator in 3D. a2 -431.8mm; a3 - 20.32mm; d3 -124.4mm; d4- 431.8mm; i) all joint angles are zero. ii) all joint angles are 90. iii) plot the pose similar to the figure shown as "pose ii" iv) plot the pose similar to the figure shown as "pose iv". v) plot a pose that you like ( different from poses i to iv) axis1 4-1 4-1 Zo.Z / 0, axis 00.0- 2.-axiss Z3 -90 0 a2 Xg dy ds 90 a3 0495,06 90 0 x4,Xs,X6 6-90 axis4, 6 Rs Z 1 #2 192 RP AUTOMATION INC d4 a3 Z3 3 X2 Z4 Y2 5 x4 pose iv pose 111
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts