

Question: WRITE ARDUINO CODE System finds the obstacles and targets by using 3 ultrasonic sensors on the main body and another 3 on the cage. The
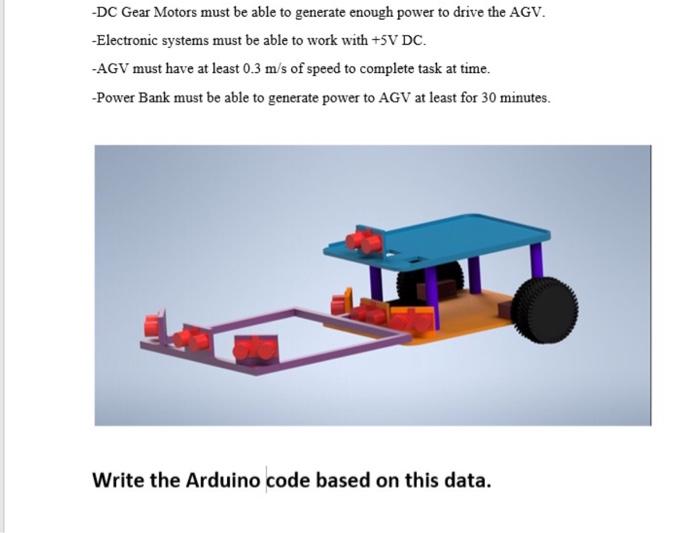
System finds the obstacles and targets by using 3 ultrasonic sensors on the main body and another 3 on the cage. The displacement of the sensors is one front, one left corner and one right corner for main body and cages. Displacement may be seen more clearly from the pictures at the section appendices. Before target is cached only main body sensors are working and after target cached only cage sensors are working to prevent overloading. Also, main body sensors will see the cage after cage closed on the target that's why system never use si sensors at the same time. Ultrasonic sensors give data to microcontroller (Arduino Mega). That data is used to determine if it is an obstacle or target, how far is that object and where it is placed due to the AGV. Algorithm working principle is after determining the object type and placement area it decides what movement will be operated. For example, if it is an obstacle and it is on right due to AGV then AGV moves back then left and continues forward. If AGV decides it is a target, it caches the target by using a cage system and the cage movement provided by a servo motor. After target cached reflective sensor will be started to take data to find marked area that will be target objects placed by using advantage of the colour difference on the ground. While AGV searches the marked area it keeps avoid obstacles by using sensors on the cage. If marked area found, AGV moves back to place target object the marked area more precisely and opens the cage so, target object will be placed. After placement AGV searches the other target objects and this loop continues until all job is done. Arduino Mega (1) DC Gearmotor (2) Wheels (2) Ball Caster (2) Powerbank (1) L298N Motor Driver (1) HC-SR04 Ultrasonic Sensor (1) 74HC08 And Gate (1) Resistors CNY 70 Infrared Sensor (1) Connecting Cables Servo Motor (1) Power Cables Performance Requirements of the System MG995 Servo Motor must be able to provide enough torque to lift the cage. -MG995 Servo Motor must be able to stay at specified degree. -HC-SR04 Ultrasonic Sensor must have at least 1 cm of accuracy. -CNY-70 Infrared Sensor must be able to discriminate black and white-grey surface at 1cm of height from ground -DC Gear Motors must be able to generate enough power to drive the AGV. -Electronic systems must be able to work with +5V DC. -AGV must have at least 0.3 m/s of speed to complete task at time. -Power Bank must be able to generate power to AGV at least for 30 minutes. Write the Arduino code based on this data
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts