

Question: You are given x , y marker data for the knee, ankle, and toe. Positions are in meters, and the origin of the coordinate system
You are given xy marker data for the knee, ankle, and toe. Positions are in meters, and the origin of the coordinate system if the
global lab system.
knee
ankle
toe
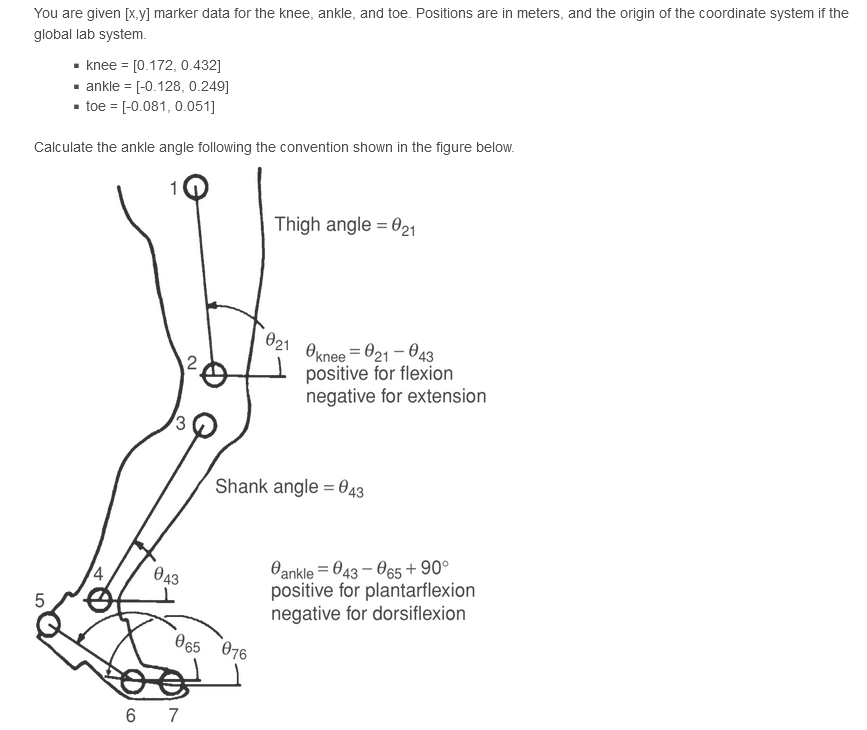
Calculate the ankle angle following the convention shown in the figure below.
What is wrong with my code?
To calculate the ankle angle using the convention shown in the figure above, the foot and shank segment angles need to be calculated.
Create a variable named kneexy and assign the xvalue for the knee to the first element of a row vector and the yvalue of the knee to the second element of the vector.
kneexy ;
Create a variable named anklexy and assign the xvalue for the ankle to the first element of a row vector and the yvalue of the ankle to the second element of the vector.
anklexy ;
Create a variable named toexy and assign the xvalue for the toe to the first element of a row vector and the yvalue of the toe to the second element of the vector.
toexy ;
Calculate the shank segment angle in degrees and assign to variable shankangle
shankangle atandanklexy kneexy anklexy kneexy;
Calculate the foot segment angle in degrees and assign to variable footangle
footangle atandtoexy anklexy toexy anklexy;
Calculate the ankle angle in degrees and assign to variable ankleangle
ankleangle footangle shankangle ;
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock