

Question: Consider the closed-loop control system shown in Figure 4.74. (a) Use proportional control (D(s)=K_{P}). Does this controller provide additional damping? (b) Use PD control, (D(s)=K_{P}+K_{D})
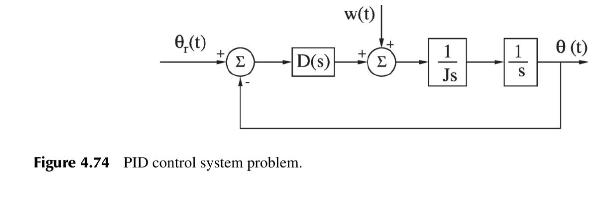
Consider the closed-loop control system shown in Figure 4.74.
(a) Use proportional control \(D(s)=K_{P}\). Does this controller provide additional damping?
(b) Use PD control, \(D(s)=K_{P}+K_{D}\) s. Determine the tracking and disturbance-rejection properties for step inputs on \(\theta_{r}(t)\) and \(w(t)\).
(c) Use PI control, \(D(s)=K_{P}+\frac{K_{I}}{s}\). Discuss the effect of this controller on the stability of the system.
(d) Use PID control, \(D(s)=K_{P}+\frac{K_{I}}{s}+K_{D}\) s. Discuss the effect of this controller on the stability and steady-state errors of the system. What are the two system types when the PID is employed?
w(t) e,(t) 1 D(s) Js S Figure 4.74 PID control system problem. 1 e (t)
Step by Step Solution
3.47 Rating (147 Votes )
There are 3 Steps involved in it
The transfer function with respect to reference Trs is obtained from the block diagram by setting the disturbance to zero as follows beginaligned Trs fracThetasThetarsfracfracDsJ s21fracDsJ s2 fracDsD... View full answer

Get step-by-step solutions from verified subject matter experts