

Question: Shown in Figure is the coupled-form implementation of a two-pole filter with poles at x = re ?j0 . There are four real multiplications per
Shown in Figure is the coupled-form implementation of a two-pole filter with poles at x = re?j0. There are four real multiplications per output point. Let ei(n), i = 1, 2, 3, 4 represent the round-off noise in fixed-point implementation of the filter. Assume that the noise sources are zero-mean mutually uncorrelated stationary white noise sequences. For each n the probability density function p(e) is uniform in the range -?/2 ? e ? ?/2, where ? = 2-b.
(a) Write the two coupled difference equations for y(n) and v(n), including the noise sources and the input sequence x(n)
(b) From these two difference equations, show that the filter system function H1(z) and H2(z) between the input noise terms e1(n) + e2(n) and e3(n) + e4(n) and the output y(n) are:
We know that
Determine h1(n) and h2(n).
(c) Determine a closed-form expression for the variance of the total noise from ei(n), i = 1, 2, 3, 4 at the output of the filter.
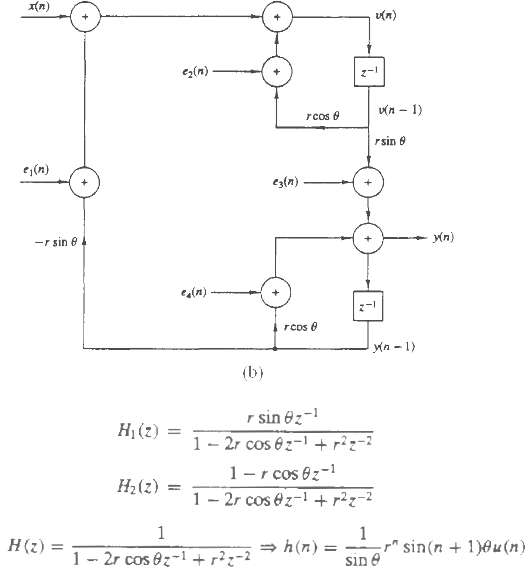
(n) un) ez(n) v(n - 1) rcos e rsin 8 e,(n) ez(n) Mn) -r sin e esin) Xn - 1) (b) r sin 6z- 1- 2r cos 6z- + riz-2 1-r cos 6z-1 1- 2r cos ez- + pz-2 H(2) H2(z) " sin(n + 1)eu (n) sin e H(z) = = h(n) = - 1- 2r cos 0z-1 + r?z-2
Step by Step Solution
3.33 Rating (171 Votes )
There are 3 Steps involved in it
a b c Define Pe rcose ... View full answer

Get step-by-step solutions from verified subject matter experts
Document Format (1 attachment)
31-E-T-E-D-S-P (861).docx
120 KBs Word File