

Question: In the SATPLAN algorithm in Figure, each call to the satisfiability algorithm asserts a goal g T where T ranges from 0 to T max
In the SATPLAN algorithm in Figure, each call to the satisfiability algorithm asserts a goal g T where T ranges from 0 to Tmax. Suppose instead that the satisfiability algorithm is called only once, with the goal g0 V g1 V…. Vg T max
a. Will this always return a plan if one exists with length less than or equal to Tm?
b. Does this approach introduce any new spurious “solutions”?
c. Discuss how one might modify a satisfiability algorithm such as WALKSAT so that it finds short solutions (if they exist) when given a disjunctive goal of this form.
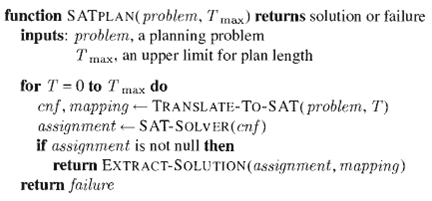
function SATPLAN(problem, T max) returns solution or failure inputs: problem, a planning problem Tmax, an upper limit for plan length for T = 0 to T max do enf, mapping - TRANSLATE-TO-SAT(problem, T) assignment - SAT-SOLVER(Cnf) if assignment is not null then return EXTRACT-SOLUTION(assignment, mapping) return failure
Step by Step Solution
3.48 Rating (164 Votes )
There are 3 Steps involved in it
a Yes this will find a plan whenever the normal SATPLAN finds a ... View full answer

Get step-by-step solutions from verified subject matter experts
Document Format (1 attachment)
21-C-S-A-I (174).docx
120 KBs Word File