

The linear model of a robot arm system being driven by a DC motor, is shown in
Question:
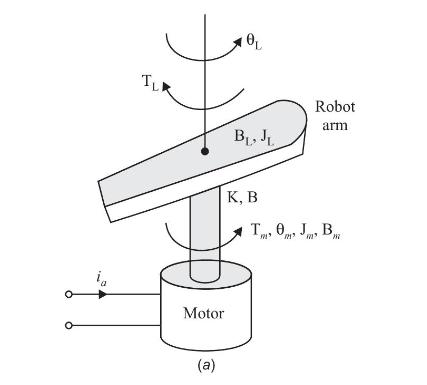
The linear model of a robot arm system being driven by a DC motor, is shown in Fig. P 9.9 (a). The system variables and parameters are given below:
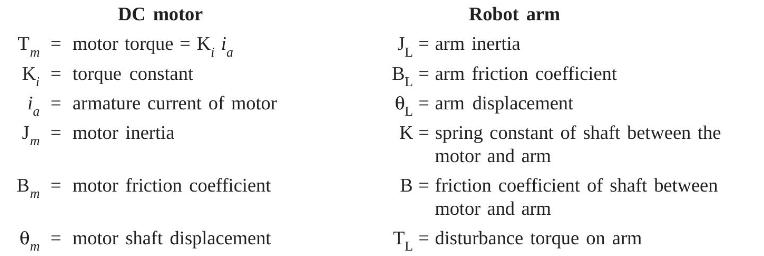
(a) Write equations describing dynamics of system with \(i_{a}(t)\) and \(\mathrm{T}_{\mathrm{L}}(t)\) as inputs and \(\theta_{m}(t)\) and \(\theta_{\mathrm{L}}(t)\) as outputs.
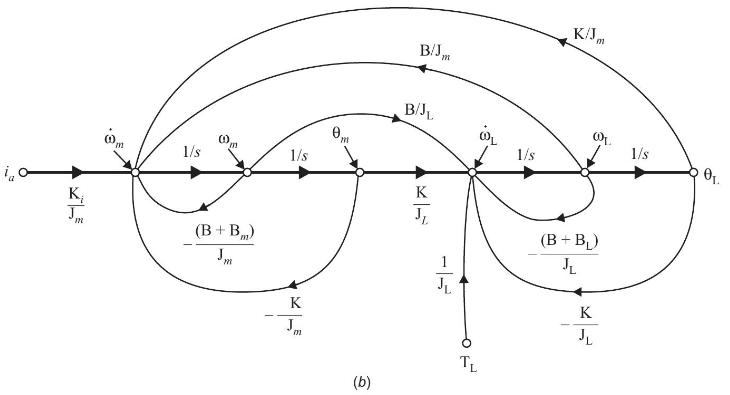
(b) Sketch signal flow graph choosing \(\mathrm{I}_{a}(s), \mathrm{T}_{\mathrm{L}}(s), \theta_{m}(s)\) and \(\theta_{\mathrm{L}}(s)\) as node variables.
Step by Step Answer:

This question has not been answered yet.
You can Ask your question!
Related Book For 
Question Posted:
