

Question: (a) Repeat Problem 8.6-6(a) and (b). (b) Design a PD controller for Problem 8.6-6(c). Use (omega_{w 1}=1). (c) Use the results of part (b) to
(a) Repeat Problem 8.6-6(a) and (b).
(b) Design a PD controller for Problem 8.6-6(c). Use \(\omega_{w 1}=1\).
(c) Use the results of part (b) to repeat Problem 8.6-6(d).
Problem 8.6-6
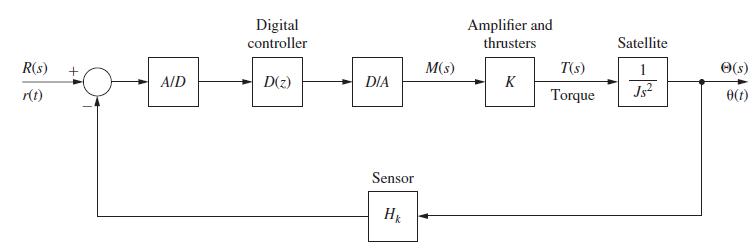
Consider the block diagram of a satellite control system shown in Fig. P8.6-6. This system is described in Problem 1.4-1. Let T = 0.1 s, K = 1, J = 0.1, and H = 0.02. It was shown in Problem 7.5-6 that G(z) = Z 1 [ [10] = 0.05(2+1) (z 1) Z The frequency response of G(z) is given in Table P7-25. Note that the gain H=0.02 is not included in this table. (a) Sketch the complete Nyquist diagram for D(z) = 1. Is this system stable? (b) This system cannot be stabilized by any type of phase-lag controller. Why? Hint: Consider the Nyquist criterion and the Nyquist diagram in part (a). (c) Design a unity-de-gain phase-lead controller that yields a system phase margin of 45. Hint: Use ww1 = 1. (d) Using MATLAB, find the unit step response for the system of part (c). Find the rise time and the per- cent overshoot for this system.
Step by Step Solution
3.31 Rating (148 Votes )
There are 3 Steps involved in it
The question presents a control system problem which generally requires following several steps including analysis design and simulation of a PD ProportionalDerivative controller for a given plant Unf... View full answer

Get step-by-step solutions from verified subject matter experts