

Question: An inverted pendulum mounted on a motor-driven cart was presented in Problem 30 of Chapter 3. The nonlinear state-space equations representing that system were linearized
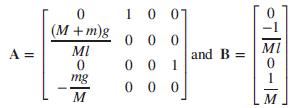
An inverted pendulum mounted on a motor-driven cart was presented in Problem 30 of Chapter 3. The nonlinear state-space equations representing that system were linearized (Prasad, 2012) around a stationary point corresponding to the pendulum point-mass, m, being in the upright position (x0 = 0 at t = 0), when the force applied to the cart was zero (u0 = 0). The state-space model developed in that problem is
ẋ = Ax + Bu
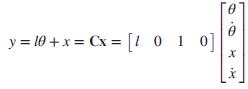
The state variables are the pendulum angle relative to the y-axis, θ, its angular speed, θ´, the horizontal position of the cart, x, and its speed, x´. The horizontal position of m(for a small angle, θ), xm = x + l sin θ = x + lθ, was selected to be the output variable.
Given the state-space model developed in that problem along with the output equation you developed in that problem, use MATLAB (or any other computer program) to find and plot the output, xm(t), in meters, for an input force, u(t), equal to a unit impulse, δ(t),in Newtons.
Data from Problem 30 of Chapter 3:
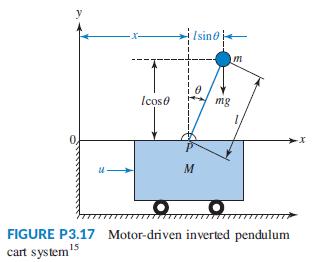
Figure P3.17 shows a free-body diagram of an inverted pendulum, mounted on a cart with a mass, M. The pendulum has a point mass, m, concentrated at the upper end of a rod with zero mass, a length, l, and a frictionless hinge. A motor drives the cart, applying a horizontal force, u(t). A gravity force, mg, acts on m at all times. The pendulum angle relative to the y-axis, θ, its angular speed, θ̇´, the horizontal position of the cart, x, and its speed, x´, were selected to be the state variables. The state-space equations derived were heavily nonlinear.14 They were then linearized around the stationary point, x0 = 0 and u0 = 0, and manipulated to yield the following open-loop model written in perturbation form: Figure P3.17 shows a free-body diagram of an inverted pendulum, mounted on a cart with a mass, M. The pendulum has a point mass, m, concentrated at the upper end of a rod with zero mass, a length, l, and a frictionless hinge. A motor drives the cart, applying a horizontal force, u(t). A gravity force, mg, acts on m at all times. The pendulum angle relative to the y-axis, θ, its angular speed, θ̇´ , the horizontal position of the cart, x, and its speed, x´, were selected to be the state variables. The state-space equations derived were heavily nonlinear.14 They were then linearized around the stationary point, x0 = 0 and u0 = 0, and manipulated to yield the following open loop model written in perturbation form:
![]()
However, since x0 = 0 and u0 = 0, then let: x = x0 + δx = δx and u = u0 + δu = δu. Thus the state equation may be rewritten as (Prasad, 2012):
ẋ = Ax + Bu
where
Assuming the output to be the horizontal position of m = xm = x + l sinθ = x + lθ for a small angle, θ, the output equation becomes:
Given that: M = 2.4 kg, m = 0.23 kg, l = 0.36 m, g = 9.81 m/s2, use MATLAB to find the transfer function, G(s)= Y(s)/U(s)= Xm(s)/U(s).
d -Sx = Ax + Bdu dt
Step by Step Solution
3.49 Rating (176 Votes )
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts