

Question: In this chapter, we described the state-space representation of single input, single-output systems. In general, systems can have multiple inputs and multiple outputs. An autopilot
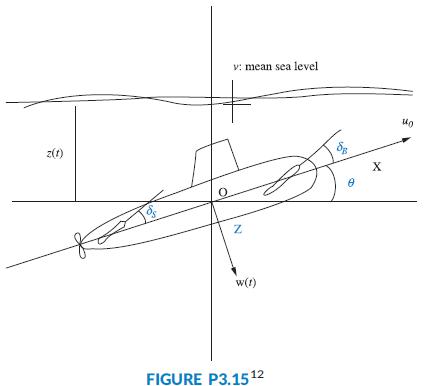
In this chapter, we described the state-space representation of single input, single-output systems. In general, systems can have multiple inputs and multiple outputs. An autopilot is to be designed for a submarine as shown in Figure P3.15 to maintain a constant depth under severe wave disturbances. We will see that this system has two inputs and two outputs and thus the scaler u becomes a vector, u, and the scaler y becomes a vector, y, in the state equations.
It has been shown that the system’s linearized dynamics under neutral buoyancy and at a given constant speed are given by
ẋ = Ax + Bu
y = Cx
where
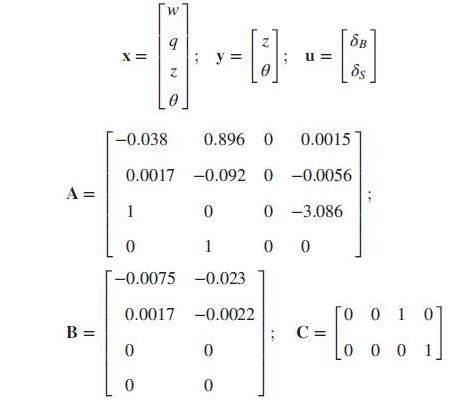
and where
w = the heave velocity
q = the pitch rate
z = the submarine depth
θ = the pitch angle
δB = the bow hydroplane angle
δS = the stern hydroplane angle
Since this system has two inputs and two outputs, four transfer functions are possible.
a. Use MATLAB to calculate the
system’s matrix transfer
function.
b. Using the results from Part a, write the transfer

V: mean sea level z(1) w(1) FIGURE P3.1512
Step by Step Solution
3.51 Rating (164 Votes )
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts