

Question: The simplified transfer function model from steering angle (s) to tilt angle (s) in a bicycle is given by In this model, h represents the
The simplified transfer function model from steering angle δ(s) to tilt angle φ(s) in a bicycle is given by
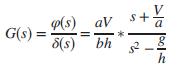
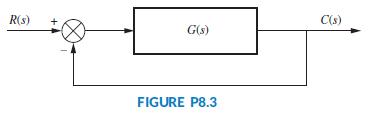
In this model, h represents the vertical distance from the center of mass to the floor, so it can be readily verified that the model is open loop unstable. (Åström, 2005). Assume that for a specific bicycle, a = 0.6 m, b = 1.5 m, h = 0.8 m, and g = 9.8m/sec. In order to stabilize the bicycle, it is assumed that the bicycle is placed in the closed-loop configuration shown in Figure P8.3 and that the only available control variable is V, the rear wheel velocity.
a. Find the range of V for closed-loop stability.
b. Explain why the methods presented in this chapter cannot be used to obtain the root locus.
c. Use MATLAB to obtain the system’s root locus.
P(s) aV s+ G(s) = d(s) bh h
Step by Step Solution
3.36 Rating (152 Votes )
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts