

Consider the temperature control system of Fig. P7.5-3. This system is described in Problem 1.6-1. For this
Question:
Consider the temperature control system of Fig. P7.5-3. This system is described in Problem 1.6-1. For this problem, ignore the disturbance input, let T = 0.6 s, and let the digital controller be a variable gain K such that D(z) = K. Hence m(kT) = Ke(kT), where e(t) is the input to the sampler. It was shown in Problem 6.2-4 that
(a) Write the closed-loop system characteristic equation.
(b) Use the Routh–Hurwitz criterion to determine the range of K for stability.
(c) Check the results of part (b) using the Jury test.
(d) Let T = 0.06 s. Find the range of K for which the system is stable.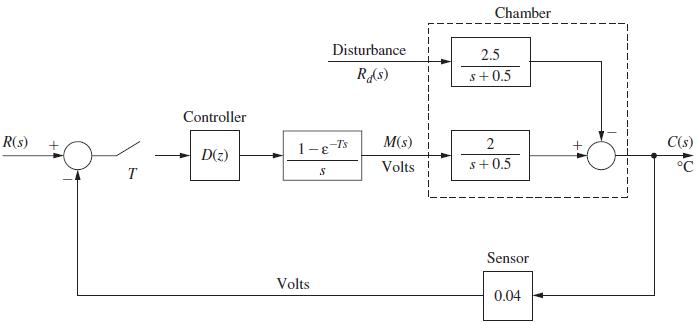
(e) Comparing the ranges of K from parts (b) and (d), give the effects on stability of adding sampling to the analog system.
Problem 1.6-1![It is shown in [6] that given the partitioned matrix H = DE F G where each partition is n xn, the determinant](https://dsd5zvtm8ll6.cloudfront.net/images/question_images/1705/6/5/2/63065aa3196bfa541705652629611.jpg)
Step by Step Answer:
a 1 KGzH01 b Gw 1037K z07408 char eq Qzz07408 004148K 0 103w 103w 1037 07408 1 KGwH01 c From a ...View the full answer



Digital Control System Analysis And Design
ISBN: 9780132938310
4th Edition
Authors: Charles Phillips, H. Nagle, Aranya Chakrabortty
