

Question: 1. (Force on a plane truss, 25 points) The figure below depicts a plane truss having 21 members (the numbered lines) connecting 12 joints (the
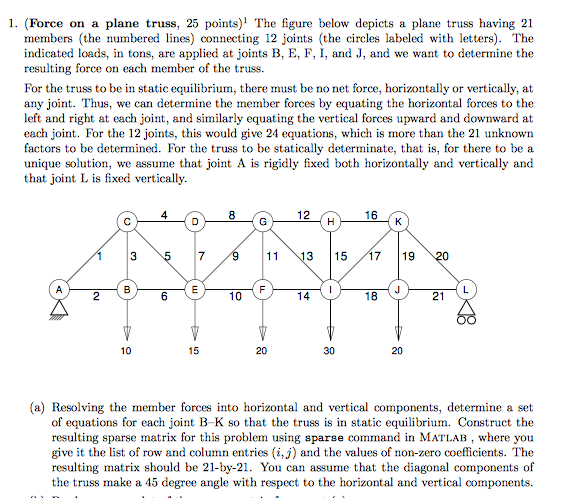
1. (Force on a plane truss, 25 points) The figure below depicts a plane truss having 21 members (the numbered lines) connecting 12 joints (the circles labeled with letters). The indicated loads, in tons, are applied at joints B, E, F, I, and J, and we want to determine the resulting force on each member of the truss. For the truss to be in static equilibrium, there must be no net force, hrizontally or vertically, at any joint. Thus, we can determine the member forces by equating the horizontal forces to the left and right at each joint, and similarly equating the vertical forces upward and downward at each joint. For the 12 joints, this would give 24 equations, which is more than the 21 unknown factors to be determined. For the truss to be statically determinate, that is, for there to be a unique solution, we assume that joint A is rigidly fixed both horizontally and vertically and that joint L is fixed vertically 11 \13 |15 /17 |19 18 21 20 (a) Resolving the member forces into horizontal and vertical components, determine a set of equations for each joint B-K so that the truss is in static equilibrium. Construct the resulting sparse matrix for this problem using sparse command in MATLAB, where you give it the list of row and column entries (i, j) and the values of non-zero coefficients. The resulting matrix should be 21-by-21. You can assume that the diagonal components of the truss make a 45 degree angle with respect to the horizontal and vertical components. 1. (Force on a plane truss, 25 points) The figure below depicts a plane truss having 21 members (the numbered lines) connecting 12 joints (the circles labeled with letters). The indicated loads, in tons, are applied at joints B, E, F, I, and J, and we want to determine the resulting force on each member of the truss. For the truss to be in static equilibrium, there must be no net force, hrizontally or vertically, at any joint. Thus, we can determine the member forces by equating the horizontal forces to the left and right at each joint, and similarly equating the vertical forces upward and downward at each joint. For the 12 joints, this would give 24 equations, which is more than the 21 unknown factors to be determined. For the truss to be statically determinate, that is, for there to be a unique solution, we assume that joint A is rigidly fixed both horizontally and vertically and that joint L is fixed vertically 11 \13 |15 /17 |19 18 21 20 (a) Resolving the member forces into horizontal and vertical components, determine a set of equations for each joint B-K so that the truss is in static equilibrium. Construct the resulting sparse matrix for this problem using sparse command in MATLAB, where you give it the list of row and column entries (i, j) and the values of non-zero coefficients. The resulting matrix should be 21-by-21. You can assume that the diagonal components of the truss make a 45 degree angle with respect to the horizontal and vertical components
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts