

Question: 10 Xo Axis-1 21-1 88-1 Draw the link frames for the limb in the picture (only x and z axes for each joint), then
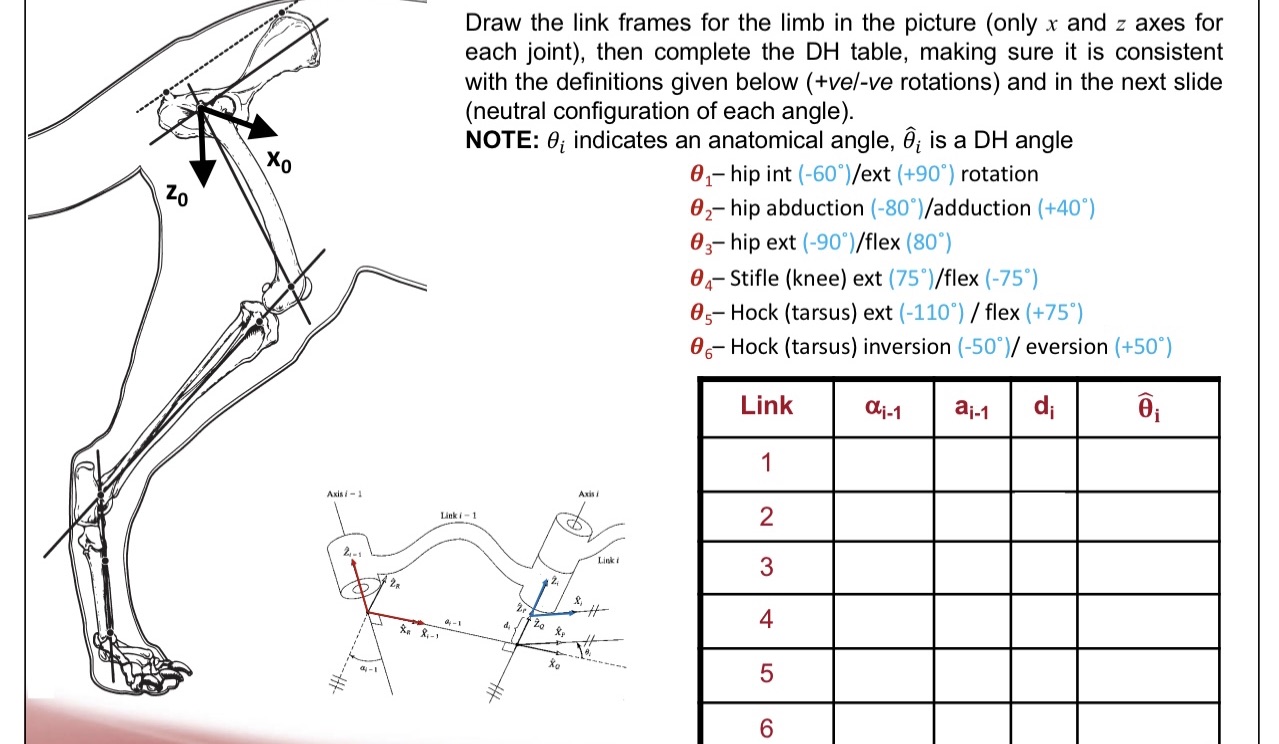
10 Xo Axis-1 21-1 88-1 Draw the link frames for the limb in the picture (only x and z axes for each joint), then complete the DH table, making sure it is consistent with the definitions given below (+ve/-ve rotations) and in the next slide (neutral configuration of each angle). NOTE: 0; indicates an anatomical angle, , is a DH angle 0- hip int (-60)/ext (+90) rotation 02-hip abduction (-80) /adduction (+40) 03- hip ext (-90) /flex (80) 04-Stifle (knee) ext (75)/flex (-75) 05-Hock (tarsus) ext (-110) / flex (+75) 06- Hock (tarsus) inversion (-50)/ eversion (+50) di-1 a-1 d 0 Linki-1 8 Axis i 8 Link i Link 2 3 4 5 6
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts