

Question: 2. Suppose that a process can be adequately modeled by G(s) : first-order-plustime-delay model with K=2,=5,=1 : (a) Calculate PI controller settings using the IMC
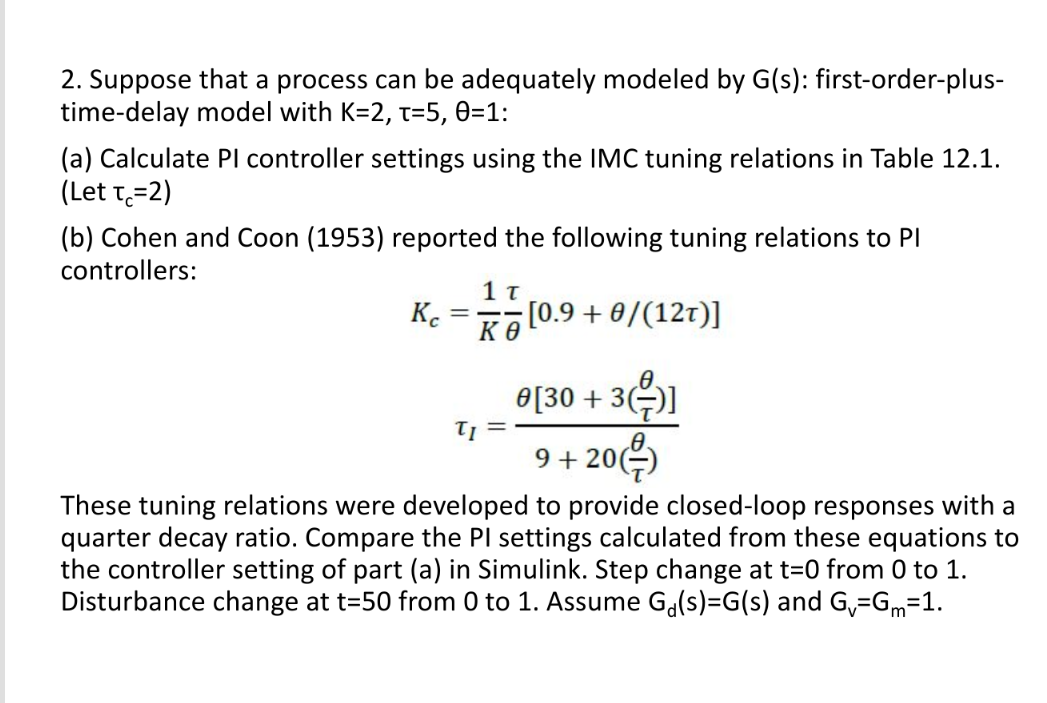
2. Suppose that a process can be adequately modeled by G(s) : first-order-plustime-delay model with K=2,=5,=1 : (a) Calculate PI controller settings using the IMC tuning relations in Table 12.1. (Let c=2 ) (b) Cohen and Coon (1953) reported the following tuning relations to PI controllers: Kc=K1[0.9+/(12)]I=9+20()[30+3()] These tuning relations were developed to provide closed-loop responses with a quarter decay ratio. Compare the PI settings calculated from these equations to the controller setting of part (a) in Simulink. Step change at t=0 from 0 to 1. Disturbance change at t=50 from 0 to 1. Assume Gd(s)=G(s) and Gv=Gm=1. 2. Suppose that a process can be adequately modeled by G(s) : first-order-plustime-delay model with K=2,=5,=1 : (a) Calculate PI controller settings using the IMC tuning relations in Table 12.1. (Let c=2 ) (b) Cohen and Coon (1953) reported the following tuning relations to PI controllers: Kc=K1[0.9+/(12)]I=9+20()[30+3()] These tuning relations were developed to provide closed-loop responses with a quarter decay ratio. Compare the PI settings calculated from these equations to the controller setting of part (a) in Simulink. Step change at t=0 from 0 to 1. Disturbance change at t=50 from 0 to 1. Assume Gd(s)=G(s) and Gv=Gm=1
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts