

Question: 3. Consider a robot arm whose base is fixed to the work floor. The arm has to pick up items at various points and
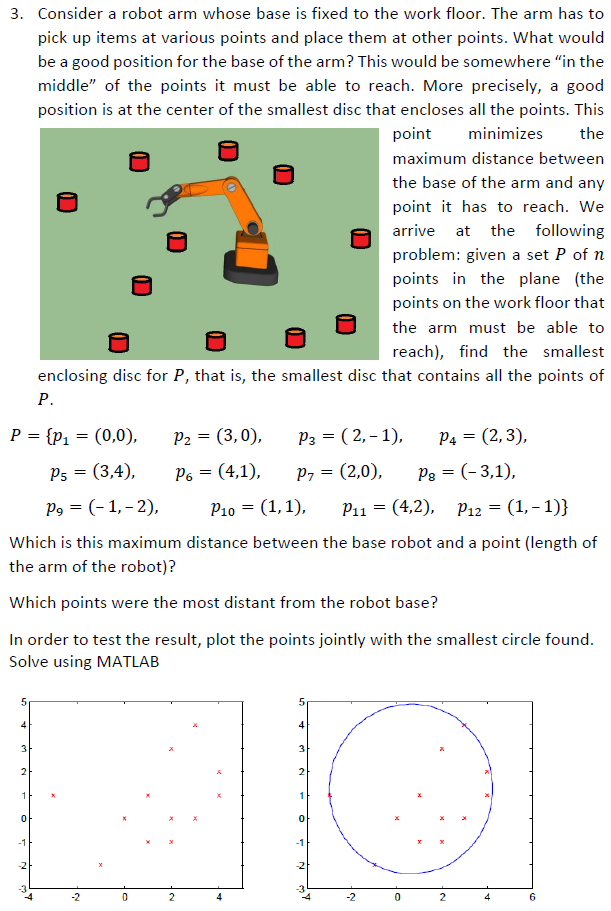
3. Consider a robot arm whose base is fixed to the work floor. The arm has to pick up items at various points and place them at other points. What would be a good position for the base of the arm? This would be somewhere "in the middle" of the points it must be able to reach. More precisely, a good position is at the center of the smallest disc that encloses all the points. This point minimizes the maximum distance between the base of the arm and any point it has to reach. We arrive at the following problem: given a set P of n points in the plane (the points on the work floor that the arm must be able to reach), find the smallest enclosing disc for P, that is, the smallest disc that contains all the points of P. P = {p = (0,0), P2 == (3,0), P3 = (2,-1), P4 = (2,3), Ps = (3,4), P6 = (4,1), P7 = (2,0), Pg = (-3,1), P9 = (-1,-2), P10 = (1,1), = P11 (4,2), P12 = (1,-1)} Which is this maximum distance between the base robot and a point (length of the arm of the robot)? Which points were the most distant from the robot base? In order to test the result, plot the points jointly with the smallest circle found. Solve using MATLAB 4 ++ 3 2 1 0 -1 23 -2 0 2 4 5 4 3 2 0 -1 -2 0 2 4 6
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts