

Question: 6 Frames, translations and rotations Given frames: Frame {A}= universe, Frame {B}={BAR=[cos(135)sin(135)sin(135)cos(135)],APBorg=[34]}, Frame {C}={CBR=[cos(30)sin(30)sin(30)cos(30)],BPCorg=[22]}, Frame {D}={DAR=[cos(0)sin(0)sin(0)cos(0)],APDorg=[33]}, Frame {E}={AEAR=[cos(60)sin(60)sin(60)cos(60)],APEorg=[00]}, Frame {F}={FAR=[cos(45)sin(45)sin(45)cos(45)],APForg=[11]}, Given points: AP1=[32],BP2=[86],CP3=[35],DP4=[24],EP5=[.77], FP6=[3.142.718],GP7=[34] Questions:
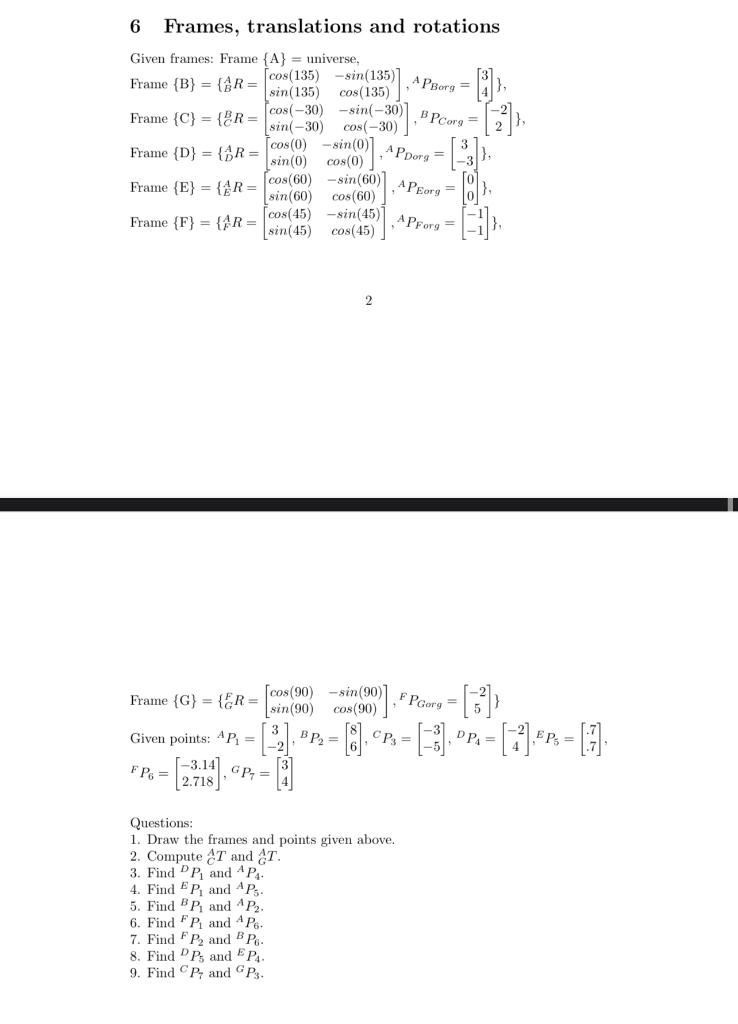
6 Frames, translations and rotations Given frames: Frame {A}= universe, Frame {B}={BAR=[cos(135)sin(135)sin(135)cos(135)],APBorg=[34]}, Frame {C}={CBR=[cos(30)sin(30)sin(30)cos(30)],BPCorg=[22]}, Frame {D}={DAR=[cos(0)sin(0)sin(0)cos(0)],APDorg=[33]}, Frame {E}={AEAR=[cos(60)sin(60)sin(60)cos(60)],APEorg=[00]}, Frame {F}={FAR=[cos(45)sin(45)sin(45)cos(45)],APForg=[11]}, Given points: AP1=[32],BP2=[86],CP3=[35],DP4=[24],EP5=[.77], FP6=[3.142.718],GP7=[34] Questions: 1. Draw the frames and points given above. 2. Compute CAT and GAT. 3. Find DP1 and AP4. 4. Find EP1 and AP5. 5. Find BP1 and AP2. 6. Find FP1 and AP6. 7. Find FP2 and BP6. 8. Find DP5 and EP4. 9. Find CP7 and GP3. 6 Frames, translations and rotations Given frames: Frame {A}= universe, Frame {B}={BAR=[cos(135)sin(135)sin(135)cos(135)],APBorg=[34]}, Frame {C}={CBR=[cos(30)sin(30)sin(30)cos(30)],BPCorg=[22]}, Frame {D}={DAR=[cos(0)sin(0)sin(0)cos(0)],APDorg=[33]}, Frame {E}={AEAR=[cos(60)sin(60)sin(60)cos(60)],APEorg=[00]}, Frame {F}={FAR=[cos(45)sin(45)sin(45)cos(45)],APForg=[11]}, Given points: AP1=[32],BP2=[86],CP3=[35],DP4=[24],EP5=[.77], FP6=[3.142.718],GP7=[34] Questions: 1. Draw the frames and points given above. 2. Compute CAT and GAT. 3. Find DP1 and AP4. 4. Find EP1 and AP5. 5. Find BP1 and AP2. 6. Find FP1 and AP6. 7. Find FP2 and BP6. 8. Find DP5 and EP4. 9. Find CP7 and GP3
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts