

Question: 6Q is correct 1.23 so Q5 could you please solve it. The kinematics of the 7R WAM robot are given in Section 4.1 .3 in
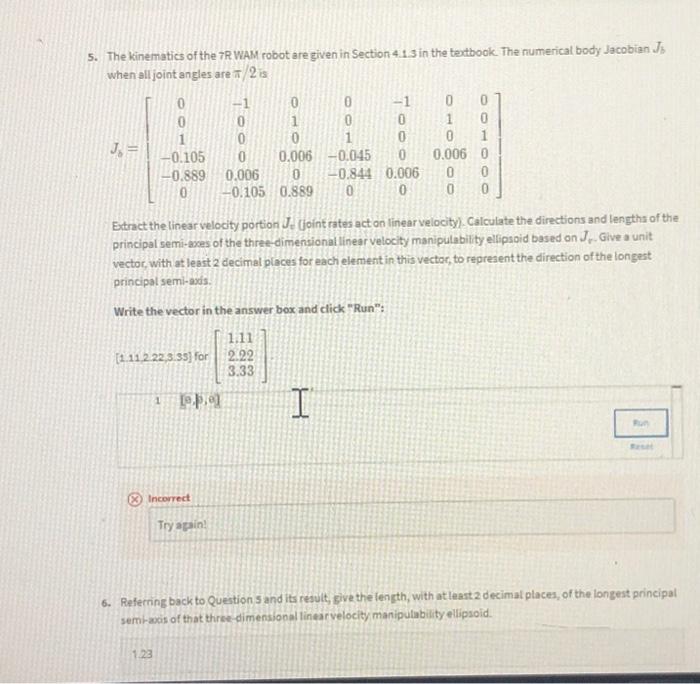
The kinematics of the 7R WAM robot are given in Section 4.1 .3 in the tertbook. The numerical body Jacobian Jk when strjoint angles are /2 is Jb=0010.1050.889010000.0060.1050100.00600.8890010.0450.844010000.00600100.00600001000 Extract the linear velocity portion Jv (joint rates act on linear velocity). Calculate the directions and lengths of the principal semi-axes of the three-dimensional linear velocity manipulability ellipsoid based on Jv. Give a unit vector, with at least 2 decimal places for each element in this vector, to represent the direction of the longast principal semi-axds. Write the vector in the answer box and click "Run": [1.11,222,3.35] for 1.112.223.33 1 [0, p, ] 6. Referring back to Question 5 and its result, Eive the length, with at least 2 decimal places, of the longest principal sem-axis of that three-dimensional lin 4 rvelocity manipulability ellipsoid
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts