

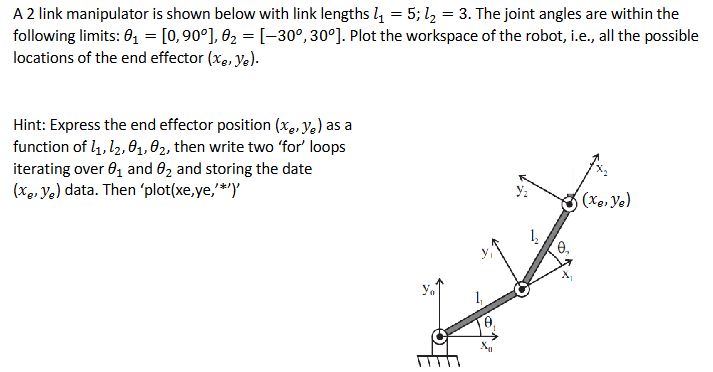
Question: A 2 link manipulator is shown below with link lengths l 1 = 5 ; l 2 = 3 . The joint angles are within
A link manipulator is shown below with link lengths ; The joint angles are within the
following limits: Plot the workspace of the robot, ie all the possible
locations of the end effector
Hint: Express the end effector position as a
function of then write two 'for' loops
iterating over and and storing the date
data. Then 'plotxeye Use MATLAB
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock