

Question: A camera is located and oriented with respect to a world coordinate system as shown in the following figure. In particular, the origin of the
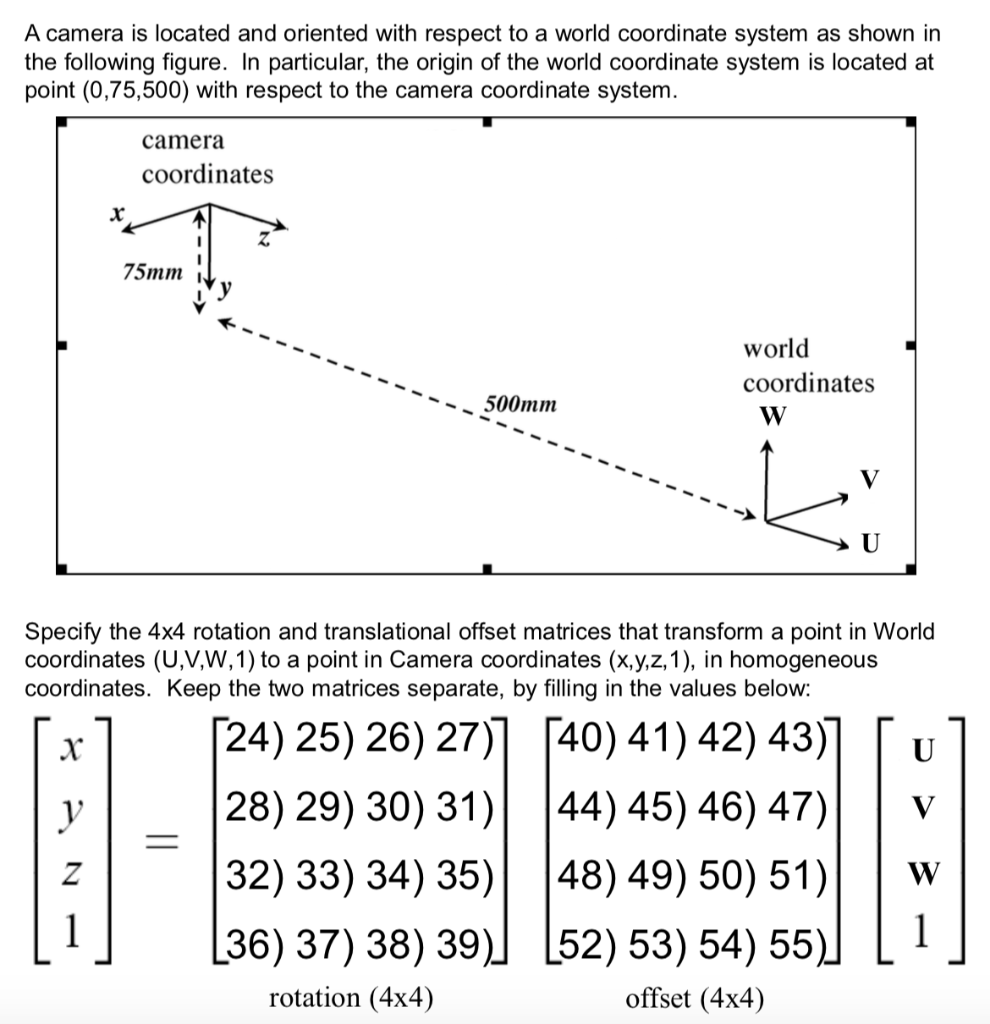
A camera is located and oriented with respect to a world coordinate system as shown in the following figure. In particular, the origin of the world coordinate system is located at point (0,75,500) with respect to the camera coordinate system camera coordinates 2 75mm world coordinates Specify the 4x4 rotation and translational offset matrices that transform a point in World coordinates (U,V,W,1) to a point in Camera coordinates (x,y,z,1), in homogeneous coordinates. Keep the two matrices separate, by filling in the values below: 24) 25) 26) 27 40) 41) 42) 43 U 28) 29) 30) 31) 44) 45) 46)47)V 32) 33) 34) 35) 48) 49) 50) 51W 36) 37) 38) 39) 52) 53) 54) 55) L1 rotation (4x4) offset (4x4) A camera is located and oriented with respect to a world coordinate system as shown in the following figure. In particular, the origin of the world coordinate system is located at point (0,75,500) with respect to the camera coordinate system camera coordinates 2 75mm world coordinates Specify the 4x4 rotation and translational offset matrices that transform a point in World coordinates (U,V,W,1) to a point in Camera coordinates (x,y,z,1), in homogeneous coordinates. Keep the two matrices separate, by filling in the values below: 24) 25) 26) 27 40) 41) 42) 43 U 28) 29) 30) 31) 44) 45) 46)47)V 32) 33) 34) 35) 48) 49) 50) 51W 36) 37) 38) 39) 52) 53) 54) 55) L1 rotation (4x4) offset (4x4)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts